
Un regolatore di tensione automatico controlla la tensione di alimentazione. La tensione viene stabilizzata dopo essere stata convertita. La variazione del carico sul sistema di alimentazione è la causa principale della fluttuazione della tensione. L'equipaggiamento nel sistema elettrico risulta danneggiato dalle variazioni di tensione.

Installando strumenti di controllo della tensione in vari punti, come vicino a
trasformatori,
generatori,
linee di distribuzione, ecc.,
aiuterà a regolare la varianza di tensione.
Il regolatore di tensione è disponibile in più punti del sistema elettrico per regolare le fluttuazioni di tensione.

In un sistema di alimentazione DC, se le linee di distribuzione sono tutte della stessa lunghezza, la tensione può essere regolata utilizzando diversi generatori complessivi; tuttavia, se le linee di distribuzione hanno tutte lunghezze diverse, viene utilizzato un booster di linea per mantenere una tensione costante alla fine di ciascuna linea. La tensione di un sistema AC può essere regolata utilizzando una varietà di tecniche, tra cui
trasformatori booster,
regolatori a induzione,
condensatori shunt, ecc.
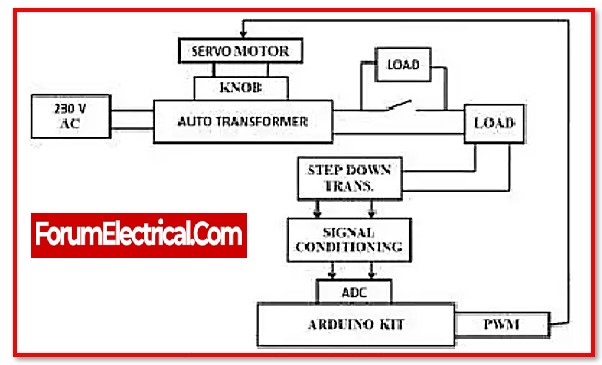
Una parte dell'avvolgimento dell'autotrasformatore monofase è divisa tra primario e secondario. In un trasformatore bifilare, gli avvolgimenti primario e secondario sono isolati elettricamente, ma non nella condizione di un autotrasformatore. Se la tensione aumenta, l'AVR lo rileva, lo confronta con la tensione di riferimento e genera un segnale di errore. Questo segnale di errore viene poi inviato al motore servo tramite un segnale PWM dall'Arduino.
Poiché il motore servo e l'autotrasformatore sono collegati, quando il servo rileva un output dell'Arduino, entrambi ruotano automaticamente a causa dell'accoppiamento. Mentre la tensione diminuisce, i motori servo rilevano errori, e il loro accoppiamento aumenta il livello di tensione, il che implica che l'autotrasformatore monofase in questa condizione funziona come un sistema BUCK BOOST.

Un motore servo è simile a un motore DC e ha alcune parti aggiuntive a scopo specifico che trasformano un motore DC in un servo. Un piccolo motore DC, un potenziometro, un meccanismo a ingranaggi e elettronica avanzata sono tutti componenti di un'unità servo. Il servo ruota accoppiato alla circuitazione principale e al potenziometro.

C'è un albero di uscita su un motore servo. Invio di un segnale codificato al servo permette a questo albero di spostarsi in diverse posizioni angolari. Il servomotore manterrà la posizione angolare dell'albero fintanto che il segnale sarà presente sulla linea di ingresso. Se il segnale cambia, la posizione angolare dell'albero cambia.
Poiché l'unità di condizionamento del segnale richiede un livello di tensione basso, viene utilizzato un trasformatore abbassatore per ridurre 230 V a 5 V. Il trasformatore riduce il livello di tensione per la rettifica.
Il condizionamento del segnale è il processo di trasformazione di un segnale analogico in modo che soddisfi i requisiti per il successivo livello di elaborazione. I convertitori analogico-digitale sono dove viene utilizzato più frequentemente. Nella fase di condizionamento del segnale, vengono utilizzati amplificatori operazionali per eseguire l'amplificazione del segnale.
Collegandolo, una fonte di alimentazione AC da rete può essere utilizzata per alimentare direttamente le schede Arduino. La funzione del regolatore di tensione è quella di regolare la tensione fornita alla scheda Arduino e mantenere le tensioni DC utilizzate dall'unità di elaborazione e dagli altri componenti.
Funziona secondo il principio di rilevamento degli errori. La tensione di uscita di una fonte di alimentazione AC viene ottenuta utilizzando un trasformatore di tensione, rettificata, poi filtrata e infine misurata rispetto a uno standard. La tensione di errore è definita come la varianza tra la tensione effettiva e quella di riferimento. Un amplificatore fornisce quindi all'eccitatore principale (o) pilotato la tensione di errore amplificata.
Pertanto, i segnali di errore amplificati regolano la variazione di tensione controllando l'azione buck o boost utilizzata per stimolare l'eccitatore principale o pilota. La tensione terminale dell'alternatore primario è controllata dal controllo dell'uscita dell'eccitatore.
Regola la tensione del sistema e avvicina il funzionamento delle macchine a un'operazione stabile e a stato stazionario.
Distribuisce il carico reattivo tra gli alternatori in parallelo.
Una riduzione improvvisa del carico sul sistema può portare a sovratensioni, che vengono ridotte dai regolatori di tensione automatici.
Aumenta l'eccitazione del sistema durante le condizioni di guasto in modo che sia presente la massima potenza di sincronizzazione quando il guasto viene eliminato.
Le caratteristiche di un regolatore di tensione automatico di alta qualità sono elencate di seguito:
1). Regolazione della tensione
2). Intervallo di tensione d'ingresso
3). Impedenza bassa
4). Compatibilità con il carico
5). Precisione della tensione











{kind=link}
{kind=link}
{kind=link}