
Avtomatski regulator napetosti nadzira napetost oskrbe. Napetost je stabilizirana po pretvorbi. Variacija optoge v sistemu oskrbe je glavni vzrok variacije napetosti. Oprema v sistemu oskrbe je škodljiva zaradi variacij napetosti.

Namestitev naprav za nadzor napetosti na različnih mestih, kot so blizu
transformatorjev,
generatorjev,
napajalnikov itd.,
bo pomagala pri ureditvi variacij napetosti.
Regulator napetosti je na voljo na večih točkah v sistemu oskrbe, da uredi variacije napetosti.

V sistemih z enosmerne struje, če so vse napajalnice enake dolžine, lahko napetost prilagodimo z uporabo več kompozitnih generatorjev; vendar, če so vse napajalnice različne dolžine, se uporablja posiljevalnik napajalnic, da se ohranja konstantna napetost na koncu vsake napajalnice. Napetost sistema z izmenično strujijo lahko uredimo z uporabo različnih tehnik, vključno s
posiljevalniki transformatorji,
indukcijskimi regulatorji,
shunt kondenzatorji itd.
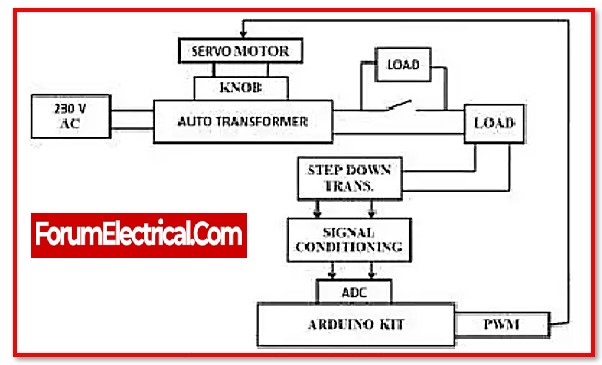
Del ovitka enofaznega avto-transformatorja je razdeljen med primarno in sekundarno ovitko. V dvofaznem transformatorju so primarna & sekundarna ovitka električno izolirani, vendar ne v stanju avto-transformatorja. Če se poveča napetost, jo AVR zazna, primerja s referenčno napetostjo in generira signal o napaki. Ta signal o napaki je nato poslan servo motorju preko PWM signala z Arduino.
Ker sta servo motor in avto-transformator povezana, ko servo zazna izhod Arduino, se oba samodejno vrtita zaradi spojnega elementa. Ko se napetost zmanjša hkrati, ko servo motorji zaznamejo napake, se njun spojni element poveča na ravni napetosti, kar pomeni, da 1-fazni avto-transformator v tem stanju deluje kot BUCK BOOST sistem.

Servo motor je podoben DC motorju in ima določene dodatne posebne namenske dele, ki DC motor spremenijo v servo. Mali DC motor & potenciometer, postavitev zupanov in napredna elektronika so sestavni deli servo enote. Servo se vrti povezan z glavnim vezjem in potenciometrom.

Na servomotorju je izhodni vrat. Pošiljanje kodiranega signala na servo omogoča premikanje vrata v različne kota. Servomotor bo ohranjal kotno lego vrata, dokler je signal na vhodni liniji. Če se signal spremeni, se spremeni tudi kotna lega vrata.
Ker enota za obdelavo signala zahteva nizko raven napetosti, se uporablja padecni transformator, da zmanjša 230 V na 5 V. Transformator zniža raven napetosti za pravokotno obdelavo.
Obdelava signala je postopek, ki analogni signal pretvori, da ustrezno zadosti zahteve za naslednjo stopnjo obdelave. Analogno-digitalni pretvorniki so najpogosteje uporabljani v fazi obdelave signala. Operacijski posiljevalniki se uporabljajo za izvedbo posiljitve signala.
Z povezovanjem ga je mogoče uporabiti za neposredno napajanje Arduino plat. Funkcija regul











{kind=link}
{kind=link}
{kind=link}