
Um regulador automático de tensão controla a tensão de alimentação. A tensão é estabilizada após ser convertida. A variação da carga no sistema de alimentação é a principal causa da flutuação de tensão. O equipamento no sistema de energia é prejudicado por variações de tensão.

Instalar instrumentos de controle de tensão em vários lugares, como próximo a
Transformadores,
Geradores,
Alimentadores, etc.,
ajudará a regular a variação de tensão.
O regulador de tensão está disponível em vários pontos do sistema de energia para regular as flutuações de tensão.

Em um sistema de alimentação DC, se os alimentadores tiverem todos o mesmo comprimento, a tensão pode ser ajustada usando vários geradores compostos; no entanto, se os alimentadores tiverem comprimentos diferentes, um reforçador de alimentador é usado para manter uma tensão consistente no final de cada alimentador. A tensão de um sistema AC pode ser regulada usando várias técnicas, incluindo
Transformadores reforçadores,
Reguladores de indução,
Condensadores em paralelo, etc.
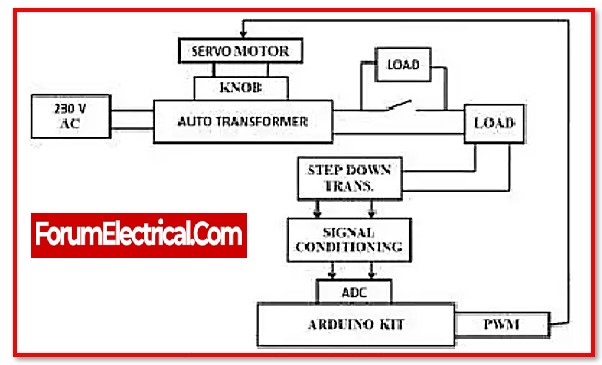
Uma parte do enrolamento do autotransformador monofásico é dividida pelo primário e secundário. Em um transformador de duas bobinas, os enrolamentos primário e secundário estão isolados eletricamente, mas não na condição de um autotransformador. Se a tensão aumentar, o AVR detecta, compara com a tensão de referência e gera um sinal de erro. Este sinal de erro é então enviado ao motor servo através de um sinal PWM pelo Arduino.
Como o motor servo e o autotransformador estão conectados, quando o servo detecta uma saída do Arduino, ambos giram automaticamente devido ao acoplamento. À medida que a tensão cai ao mesmo tempo que os motores servo detectam erros, seu acoplamento aumenta o nível de tensão, o que implica que o autotransformador monofásico nesta condição funciona como um sistema BUCK BOOST.

Um motor servo é semelhante a um motor DC e possui certas partes adicionais de propósito especial que transformam um motor DC em um servo. Um pequeno motor DC, um potenciômetro, um arranjo de engrenagens e eletrônica avançada são todos componentes de uma unidade servo. O servo gira acoplado à circuitaria principal e ao potenciômetro.

Há um eixo de saída em um motor servo. Enviar um sinal codificado para o servo permitiu que este eixo fosse movido para várias posições angulares. O motor servo manterá a posição angular do eixo enquanto o sinal estiver presente na linha de entrada. Se o sinal mudar, a posição angular do eixo muda.
Como a unidade de condicionamento de sinal exige um nível de tensão baixo, um transformador redutor é utilizado para reduzir 230 V para 5 V. O transformador reduz o nível de tensão para retificação.
O condicionamento de sinal é o processo de transformar um sinal analógico para que atenda aos requisitos do nível subsequente de processamento. Os conversores analógico-digitais são onde ele é mais frequentemente usado. Na etapa de condicionamento de sinal, amplificadores operacionais são usados para realizar a amplificação do sinal.
Ao conectá-lo, uma fonte de alimentação CA pode ser usada para alimentar diretamente as placas Arduino. A função do regulador de tensão é regular a tensão fornecida à placa Arduino e manter as tensões CC utilizadas pela unidade de processamento e outros componentes.
Ele funciona de acordo com o princípio de detecção de erro. A tensão de saída de uma fonte de alimentação CA é obtida usando um transformador de potencial, retificada, filtrada e, em seguida, comparada com um padrão. A tensão de erro é definida como a variação entre as tensões real e de referência. Um amplificador, então, fornece o excitador principal (ou) piloto com a tensão de erro amplificada.
Portanto, os sinais de erro amplificados regulam a variação de tensão controlando a ação de buck ou boost usada para estimular o excitador principal ou piloto. A tensão terminal do alternador principal é controlada pelo controle de saída do excitador.
Ele regula a tensão do sistema e aproxima o funcionamento da máquina de um estado estável de operação.
Distribui a carga reativa entre os alternadores operando em paralelo.
Uma redução súbita da carga no sistema pode levar a sobretensões, que são diminuídas pelos reguladores automáticos de tensão.
Aumenta a excitação do sistema durante condições de falha, de modo que o poder de sincronização máximo esteja presente quando a falha for eliminada.
As características de um regulador automático de tensão de alta qualidade são listadas abaixo:
1). Regulação de Tensão
2). Faixa de Tensão de Entrada
3). Baixa Impedância
4). Compatibilidade com Carga
5). Precisão de Tensão











{kind=link}
{kind=link}
{kind=link}