
Sjálfvirk spennuregulátor stýrir flutningsspennu. Spennan er staðfest eftir að hún hefur verið breytt. Breytingar á byrðu í flutningarkerfinu eru aðalorsök spennubreytinga. Vélbúnaður í raforkukerfi er skemmt af spennubreytingum.

Setja upp spennustjórnunar tæki á mismunandi stöðum, eins og nálægt
Spennubreytill,
Rafbúnaðargjafi,
Flutningarslóðir o.s.frv.,
verður að hjálpa við að stjórna spennubreytingum.
Spennuregulátorinn er tiltækur á mörgum stöðum í raforkukerfinu til að stjórna spennubreytingum.

Í DC flutningarkerfi, ef allar flutningarslóðir eru jafn löng, kann spenna vera stillt með notkun nokkurra samsettara gengivéla; en ef allar flutningarslóðir eru ólíkar lengdir, er notast við flutningarslóðarauka til að halda fastri spennu í lokin á hverri flutningarslóð. Spenna í AC kerfi kann vera stýrð með ýmsum aðferðum, eins og
Auka spennubreytill,
Induktíonarstjórnar,
Paralell fylkjara, o.s.frv.
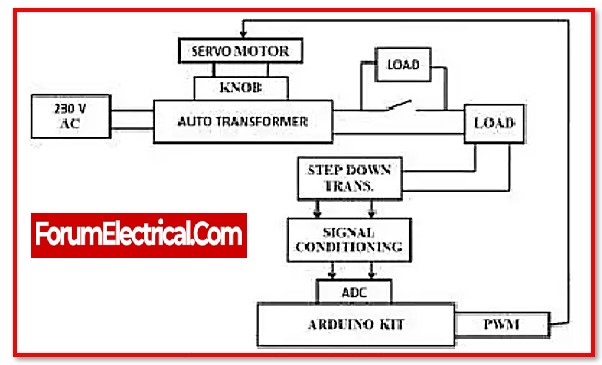
Að hluti af einfás sjálfvirka spennubreytils spennubreytis er skipt af fyrsta og önnur spennubreytill. Í tvífás spennubreytli eru fyrsta & önnur spennubreytill elektrísk aðgreind, en ekki í skilyrðum sjálfvirkra spennubreytila. Ef spennan stækkar, greinir AVR hana, sameina hana við viðmiðsspennu og mynda villusignali. Þessi villusignali er svo sent til servo motor með PWM signali frá Arduino.
Vegna tengingar milli servo motors og sjálfvirkra spennubreytila, þegar servo greinir úttak frá Arduino, snúa bæði sjálfkrafa vegna tengingar. Sem spennan lækkar á sama tíma og servo motors greina villur, stækkar tenging þeirra spennuleika, sem merkir að 1-fás sjálfvirkur spennubreytill í þessari stöð fer fram sem BUCK BOOST kerfi.

Servo motor er líkur DC motor og hefur átaklegar aukalegar sérstök markaðsþættir sem breyta DC motor í servo. Smár DC motor & potensimetrar, hjólakerfi og fremmð rafræn tæknir eru allir aðgerðir servo einingar. Servo snýr tengdur við aðal rafræn skjöl og potensimetra.

Það er úttaksaxlar á servo motor. Að senda kodlaðan signal til servos leyfir þessa axl til að færa sig í mismunandi hornastöðum. Servomotor mun halda á hornastöðu axlins svo lengi sem signal er á inntaksstrengnum. Ef signal breytist, breytist hornastöðu axlins.
Vegna þess að signalaðgerðar einingin biður um lága spennuleika, er notast við spennuleiksslekkju til að minnka 230 V til 5 V. Spennubreytill slekkjar spennuleika fyrir rettifærslu.
Signalaðgerð er ferli að breyta analogi signali svo hann uppfylli kröfur fyrir næstu stigi í vinnslu. Analog til digitala umbreytir eru þar sem það er oftast notað. Í signalaðgerðarstigi eru virkni forstærkar notaðar til að framkvæma signala stærkun.
Með tengingu hans, getur AC mains orkuvirki verið notað til að geyma Arduino borð beint. Spennuregulatörar aðferð er að stjórna spennu sem gefin er til Arduino borðs & halda á DC spennu sem notuð er af vinnsluaðila & aðrar aðgerðir.
Hann virkar eftir villugreiningarprincip. Úttaksspenna af AC orkuvirki er fengin með notkun spennubreytills, síðan rettifærð, síðan sífaldi og síðan mæld gegn staðlar. Villuspenna er skilgreind sem mismunurinn milli raunverulegrar og viðmiðar spennu. Forstækkari geymir síðan aðal exciter (eða) pilot exciter með forstærku villuspennu.
Því miður regla forstærkuð villusignali spennubreytingu með því að stjórna buck eða boost aðferð til að kveikja á aðal eða pilot exciter. Aðal alternator endaspenna er stýrð af exciter úttaksstjórnun.
Hann stjórnar spennu kerfisins og nær málinu að hafa málsælan stöðuverkun.
Hann dreifir andstæðu byrðu yfir parallel-runnanir alternators.
Plötuð byrða á kerfinu getur valdi ofrspennu, sem lágmarkast af sjálfvirkum spennuregulátum.
Hann hefur stig í kerfis virkni á mistökstöðu svo að hámarks synchro power sé til staðar þegar mistök er lauðuð.
Eiginleikar hágæða sjálfvirkra spennuregulátora eru listar hér að neðan:
1). Spennustjórnun
2). Inntaksspennu bili
3). Lág motstandur
4). Byrðu samröðun











{kind=link}
{kind=link}
{kind=link}