
Regulator automaticus tensionis regit tensionem suppeditationis. Tensio stabilizatur post conversionem. Variatio oneris in systemate suppeditationis est causa principalis fluctuationis tensionis. Apparatus in systemate electrico laeditur a variationibus tensionis.

Instrumenta controlis tensionis instalandi sunt in diversis locis, sicut prope
Transformatores,
Generatores,
Ductus, etc.,
adjuvabit ad regulandum varietatem tensionis.
Regulator tensionis disponibilis est in multis punctis in systemate electrico ad regulandum fluctuationes tensionis.

In systemate suppeditationis DC, si ductus omnes eadem longitudine sunt, tensio ajustari potest per usum generatorum compositorum; tamen, si ductus omnes differentes longitudines habent, booster ductus utitur ad tenendam constantem tensionem in fine cuiusque ductus. Tensio systematis AC regi potest variis technicis, sicut
Transformatores boosteri,
Regulatores inductionis,
Condensatores shunt, etc.
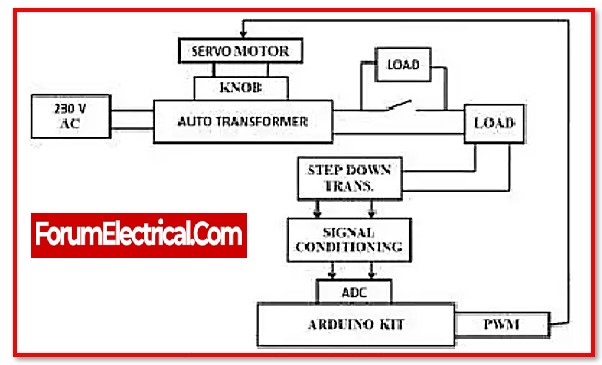
Pars autotransformatoris uniphasici divisa est per primarium et secundarium. In transformatore bipartito, venti primarius et secundarius sunt electriciter isolati, sed non in conditione autotransformatoris. Si tensio crescit, AVR detexit, comparavit cum tensione reference, et generavit signum erroris. Hoc signum erroris deinde transmittitur ad motorem servomechanici per signum PWM ab Arduino.
Quia motor servomechanicus et autotransformator coniuncti sunt, quando servomechanicus detexit output Arduino, ambo automatice rotant propter copulam. Quod tensio cadit simul atque servomotus errores detegunt, copula eorum augit nivellum tensionis, quod significat quod autotransformator uniphasicus in hac conditione fungitur ut systema BUCK BOOST.

Motor servomechanicus similis est motori DC et habet certas partes speciales quae transformant motorem DC in servomechanicum. Parvus motor DC, potentiometrum, dispositio dentata, et electronica praevia sunt omnes componentes unitatis servomechanicae. Servomechanicus rotat copulatus ad circuitum principalem et potentiometrum.

Est axis output in motore servomechanico. Mittere signum codificatum ad servomechanicum permisit hunc axem moveri ad varias positiones angulares. Servomechanicus retinet positionem angularis axem quamdiu signum est in linea input. Si signum mutatur, mutatur etiam positio angularis axem.
Cum unitas conditionis signalis exigat nivellum tensionis parvum, transformator reductor utitur ad reducendum 230 V ad 5 V. Transformator redigit nivellum tensionis ad rectificationem.
Conditionis signalis est processus transformandi signum analogum ut satisfaciat requisitiones ad sequentem gradum processingis. Conversores analogo-digitalis sunt ubi frequentissime utuntur in stadio conditionis signalis. Amplificatores operationales utuntur ad faciendum amplificationem signi.
Per coniungendum, fons potentiae AC mains potest uti ad alimentandum tabulas Arduino directe. Functio regulatoris tensionis est regulare tensionem suppeditatam ad tabulam Arduino et conservare tensiones DC quae utuntur ab unitate processingis et aliis componentibus.
Fungitur secundum principium detectionis erroris. Tensio output fons potentiae AC obtinetur per transformator potentiae, rectificata, deinde filtrata, et deinde mensuratur contra standardem. Tensio erroris definitur ut varietas inter tensionem actualem et tensionem reference. Amplificator deinde suppeditat excitatori principali (vel) excitatori piloti cum tensione erroris amplificata.
Itaque, signa erroris amplificata regulant variationem tensionis per controllandum actionem buck vel boost ad stimulandum excitatorem principalem vel excitatorem pilotum. Tensio terminalis alternatoris principalis regitur per controllem output excitatoris.
Regulat tensionem systematis et appropinquat functionem machinae ad operationem stabilem constantem.
Distribuit onus reactivo inter alternatores operantes paralleliter.
Reductio subita oneris in systemate potest ducere ad overvoltages, quae diminuuntur a regulatoribus automaticis tensionis.
Aumentat excitationem systematis in condicionibus defectus ita ut sit maxima vis synchronizans quando defectus est eliminatus.
Characteristica regulatoris automatici tensionis altae qualitatis enumerantur infra:
1). Regulatio Tensionis
2). Amplitudo Tensionis Input
3). Impedimentum Parvum
4). Compatibilitas Oneris
5). Accuratia Tensionis











{kind=link}
{kind=link}
{kind=link}