
En automatisk spændingsregulator kontrollerer forsyningsstrømmen. Spændingen stabiliseres efter konvertering. Variationen i belastning på forsyningsanlægget er den primære årsag til spændingsfluktuering. Udstyr i strømsystemet skades af spændingsvariationer.

Installation af spændingskontrolinstrumenter på forskellige steder, såsom nær
transformatorer,
generatorer,
forsyningsledninger osv.,
vil hjælpe med at regulere spændingsvariationer.
Spændingsregulatoren findes på flere punkter i strømsystemet for at regulere spændingsfluktueringer.

I et DC-forsyningsanlæg, hvis forsyningsledningerne har samme længde, kan spændingen justeres ved at bruge flere kompundgeneratore. Hvis forsyningsledningerne dog har forskellige længder, anvendes en forsyningsledningsforstærker for at opretholde en konstant spænding ved slutningen af hver forsyningsledning. Spændingen i et AC-system kan reguleres ved hjælp af forskellige teknikker, herunder
forstærkende transformatorer,
induktionsregulatorer,
parallel kondensatorer osv.
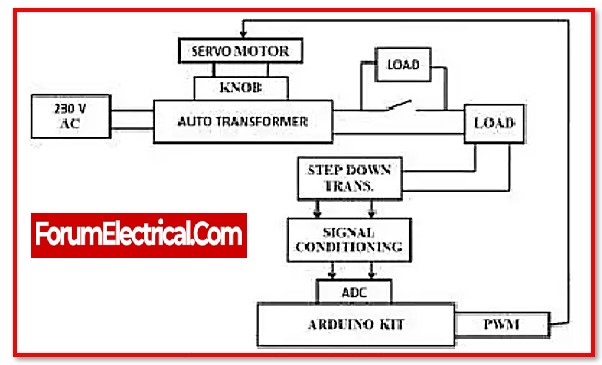
En del af enefasede autotransformatorens vindings er delt mellem primær og sekundær. I en tovindings-transformator er de primære og sekundære vindinger elektrisk isolerede, men ikke i tilfældet med en autotransformator. Hvis spændingen stiger, opdager AVR det, sammenligner det med referencespændingen og genererer en fejl-signal. Dette fejl-signal sendes derefter til servomotoren via PWM-signal fra Arduino.
Da servomotoren og autotransformator er forbundet, roterer begge automatisk, når servoen registrerer en Arduino-udgang, pga. kobling. Da spændingen falder samtidig med, at servomotorer registrerer fejl, øges deres kobling, hvilket betyder, at 1-fase autotransformator i dette tilfælde fungerer som et BUCK BOOST system.

En servomotor ligner en DC-motor og har visse yderligere specialformåldele, der omdanner en DC-motor til en servo. En lille DC-motor & en potentiometer, en tandhjulsopstilling og avancerede elektronik er alle komponenter i en servoenhed. Servoen roterer forbundet med hovedkredsløbet og potentiometeret.

Der er en udgangsskaft på en servomotor. Ved at sende et kodet signal til servo'en kunne denne skaft flyttes til forskellige vinkelpositioner. Servomotoren vil holde skaftets vinkelposition, så længe signalet er til stede på indgangslinjen. Hvis signalet ændres, ændres skaftets vinkelposition.
Da signalbehandlingsenheden kræver et lavt spændingsniveau, anvendes en trin-ned-transformator for at reducere 230 V til 5 V. Transformator træder ned spændingsniveauet for rektifikation.
Signalbehandling er processen med at omdanne et analogt signal, så det opfylder kravene for det næste niveau af behandling. Analog til digital-konverter er, hvor det mest ofte anvendes. I signalbehandlingsfasen bruges operationsforstærkere til at udføre signalets forstærkning.
Ved at tilslutte det, kan en AC-hovedstrømkilde bruges til at forsyne Arduino-plader direkte. Spændingsregulatorens funktion er at regulere spændingen, der leveres til Arduino-pladen, og opretholde de DC-spændinger, der bruges af bearbejdningenhed og andre komponenter.
Det fungerer ifølge princippet om fejldetektion. Udgangsspændingen fra en AC-strømkilde opnås ved hjælp af en potentieltransformator, rettet, filtreret og derefter målt mod en standard. Fejlspændingen defineres som variansen mellem den faktiske og reference-spænding. En forstærker leverer derefter den forstærkede fejlspænding til hovedexciteren (eller) pilotexciteren.
Derfor regulerer de forstærkede fejl-signal spændingsvariationen ved at kontrollere buck eller boost handling, der bruges til at stimulere hoved- eller pilotexciteren. Den primære alternator terminalspænding styres af exciter output kontrol.
Den regulerer systemets spænding og bringer maskinfunktion tættere på stabil, stabil drift.
Den fordeler reaktiv lasten over parallelle alternatorer.
En pludselig reduktion af last på systemet kan føre til overspændinger, som nedsættes af automatiske spændingsregulatører.
Den øger systemets opmagnetisering under fejltilstande, således at maksimal synkroniserings effekt er til stede, når fejlen er ryddet.
Egenskaberne for en højkvalitets automatiseret spændingsregulator er opført nedenfor:
1). Spændingsregulering
2). Indgangsspændingsområde
3). Lav impedans
4). Lastkompatibilitet
5). Spændingspræcision











{kind=link}
{kind=link}
{kind=link}