
En automatisk spenningregulator kontrollerer forsyningsvoltage. Voltage stabiliseres etter konvertering. Variasjon i last på forsyningsystemet er den primære årsaken til voltagefluktuasjoner. Utstyr i kraftsystemet skades av voltagevariasjoner.

Installering av spenningkontrollinstrumenter på ulike steder, som nær
Transformatorer,
Generatører,
Forsyningsledninger osv.,
vil hjelpe med å regulere voltagevariasjon.
Spenningregulator er tilgjengelig på flere punkter i kraftsystemet for å regulere voltagefluktuasjoner.

I et DC-forsyningsystem, hvis forsyningsledningene er alle like lange, kan voltage justeres ved bruk av flere sammensatte generatører; men hvis forsyningsledningene er alle forskjellige lengder, brukes en forsyningsledningsforsterker for å opprettholde en konsekvent voltage ved slutten av hver forsyningsledning. Voltage i et AC-system kan reguleres ved bruk av en rekke teknikker, inkludert
Forsterkende transformatorer,
Induksjonsregulatorer,
Shunt-kondensatorer osv.
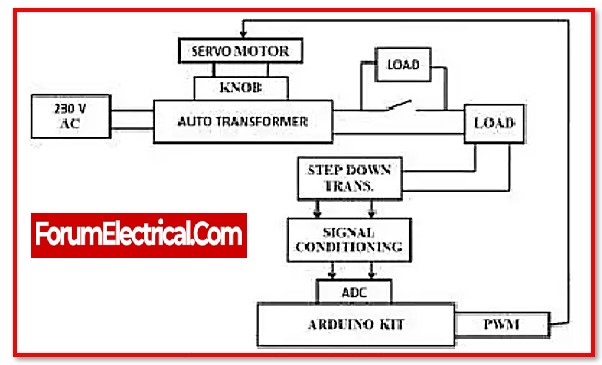
En del av enefaseautotransformatorens vindning er delt av primær og sekundær. I en tovindningstransformator er primær- & sekundær vindning elektrisk isolert, men ikke i tilfelle av en autotransformator. Hvis voltage øker, detekterer AVR det, sammenligner det med referansevoltage, og genererer en feilsignal. Dette feilsignalet sendes deretter til servomotor via PWM-signal fra Arduino.
Ettersom servomotor og autotransformator er koblet, roterer begge automatisk når servo detekterer en Arduino-utdata, grunnet koplingen. Når voltage synker samtidig som servomotorer detekterer feil, øker deres kopling voltage-nivå, noe som betyr at 1-fase autotransformator i denne situasjonen fungerer som et BUCK BOOST-system.

En servomotor er lik en DC-motor og har visse ekstra spesielle deler som transformerer en DC-motor til en servo. En liten DC-motor & en potensiometer, en hvelvangst og avanserte elektronikk er alle komponenter i en servoenhet. Servo roterer koblet til hovedkretsen og potensiometer.

Det er en utgangssakle på en servomotor. Ved å sende et kodet signal til servo, kan denne saklen flyttes til ulike vinkelposisjoner. Servomotoren vil holde saklens vinkelposisjon så lenge signalet er på inngangslinjen. Hvis signalet endres, endres saklens vinkelposisjon.
Ettersom signalkonditseringsenheten krever et lavt voltage-nivå, brukes en trinnnedbryter for å redusere 230 V til 5 V. Transformatoren trapper ned voltage-nivået for rettifikasjon.
Signalkonditsering er prosessen med å transformere et analogt signal slik at det tilfredsstiller kravene for det neste nivået av behandling. Analog til digital konvertere er der det mest ofte brukes. I signalkonditseringsfasen brukes operasjonsforsterkere for å utføre signalets forsterkning.
Ved å koble det, kan en AC-hovedstrømkilde brukes til å strømføre Arduino-plater direkte. Voltage-regulator sin funksjon er å regulere voltage som leveres til Arduino-platen & vedlikeholde DC-voltager som brukes av prosesseringsenheten & andre komponenter.
Den fungerer ifølge prinsippet om feildeteksjon. Utdataspenningsen fra en AC-strømkilde hentes ved bruk av en potensialtransformator, rektifiseres, filtreres, og måles deretter mot en standard. Feilspenningsen defineres som variansen mellom den faktiske og referansevoltage. Et forsterker leder deretter hovedoppfriskeren (eller) pilotoppfriskeren med forsterket feilvoltage.
Derfor regulerer de forsterkede feilsignalene voltagevariasjonen ved å kontrollere buck eller boost-handlingen som brukes for å stimulere hoved- eller pilotoppfriskeren. Den primære alternatorterminalvoltage kontrolleres av oppfriskerutdatakontroll.
Den regulerer systemets voltage og bringer maskinvirksomheten nærmere stabil stabil operasjon.
Den fordeler reaktiv belast over parallellkjørende alternatorer.
En plutselig reduksjon i belast på systemet kan føre til overspanning, som blir redusert av automatiske spenningregulatorer.
Den øker systemets oppfrisking under feilkondisjoner slik at maksimal synkroniseringskraft er til stede når feilen blir fjernet.
Egenskapene til en høykvalitets automatisert spenningregulator er oppført nedenfor:
1). Voltage Regulering
2). Innvoltageområde
3). Lav impedans
4). Belastningskompatibilitet
5). Voltage Nøyaktighet











{kind=link}
{kind=link}
{kind=link}