
Il-regolatur automatiku tal-voltiġġ jikkontrolla l-voltiġġ tas-sors. Il-voltiġġ jiġi stabilizzat wara li jiġi konvertit. Il-varjazzjoni fil-karriġa fuq is-sistema tas-sors hija l-każ primar tal-fluttwazzjoni tal-voltiġġ. L-eċċipiment fis-sistema tal-enerġija jiġi dani minn varjazzjonijiet tal-voltiġġ.

L-installazzjoni ta' strumenti ta' kontrol u voltiġġ f'varj postijiet, bħal
transformatori,
ġeneraturi,
feeders, etc.,
tagħti ħilga biex tiġi regolata l-varjazzjoni tal-voltiġġ.
Il-regolatur tal-voltiġġ huwa disponibbli f'punti multipli fis-sistema tal-enerġija biex jikkoordini l-fluttwazzjonijiet tal-voltiġġ.

F'sistema tas-sors DC, jekk il-feeders huma kollha tal-lunghezz stess, il-voltiġġ tista' tiġi modifikata permezz ta' diversi ġeneraturi komposti; imma, jekk il-feeders huma kollha ta' lunghezzi differenti, jintuża booster ta' feeder biex jiġi mantanut voltiġġ kostanti f'terminus ta' kull feeder. Il-voltiġġ ta' sistema AC tista' tiġi regolata permezz ta' varjetà ta' tekniki, inklużi
transformaturi booster,
regolaturi induzzjonali,
kondensaturi shunt, etc.
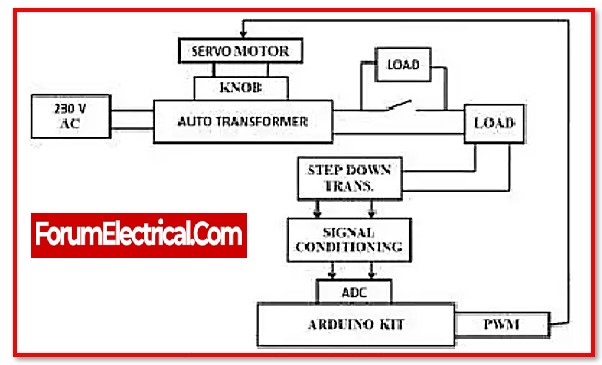
Pars ta' avvolgura tal-autotransformer faza waħda hija divisa mill-primeri u sekondari. F'transformatur bil-fas tat-tnejn, l-avvolguri primeri u sekondari huma isolati elektrikament, ma mhux fl-istat tal-autotransformer. Jekk il-voltiġġ tgħadid, l-AVR jiddeċideha, jiġi magħmula mal-voltiġġ referenzja, u jġenera segnjal tal-errur. Dan is-senjal tal-errur jinbidel lil motor servo permezz ta' segnjal PWM minn Arduino.
Billi l-motor servo u l-autotransformer huma mikonnessi, meta l-servo jiddeċied output ta' Arduino, kollox jirrotaw awtomatikament għall-koppjatura. Waqt li l-voltiġġ titlaq, waqt li l-moturi servo jiddetgħajjru l-erruri, l-koppjatura tagħtihom livell ta' voltiġġ, li jidher li l-1 faza auto transformer fi dan l-istat tfunzjona bħala sustema BUCK BOOST.

Motor servo huwa simili għal motor DC u għandu parti speċiali addizzjonali li jassiguraruh b'servo. Motor DC żgħir, potenziometru, sistem tal-ingranaggi, u elettronika avvanzata huma kollha komponenti ta' unità servo. Is-servo jirrotal qbil il-kitba prinċipali u potenziometru.

Huwa hemm aks servomotor. L-abbanda ta' segnjal kodifikat għas-servo ġġabdat aks dan biex jirnexxel lejn posizzjonijiet angljar differenti. Is-servomotor se jiġi msallem l-posizzjoni angljar tal-aks fintantax is-senjal jeħles fuq il-linja tal-input. Jekk is-senjal jibdel, l-posizzjoni angljar tal-aks tbdel.
Billi l-unità ta' kondizzjonament tas-senjal tixtieq livell ta' voltiġġ baż, jintuża transformatur step down biex jiġi ridott 230 V għal 5 V. It-transformatur jidherreġġa l-livell tal-voltiġġ għal rekttifikazzjoni.
It-tifitx ta' senjal analog huwa l-proċess ta' trasformazzjoni tas-senjal analog biex ikun jissodisfa r-requisiti għal livell successiv ta' proċess. Konverturijiet analog-digital huma fejn huwa aktar sovent imitat. Fl-istagju ta' kondizzjonament tas-senjal, amplifikaturi operattivi huma imitat biex jagħmlu l'amplifikazzjoni tas-senjal.
Biex tikkonnessjaw, sors tal-enerġija AC mains tista' tuża biex tippjanzil boards Arduino direttament. Il-funzjoni tal-regolatur tal-voltiġġ huwa li jiregola l-voltiġġ furnita għal board Arduino u jiġi mmantanut il-voltiġġ DC li huma imitat mill-unità ta' proċess u komponenti oħra.
Jfunzjona skont il-prinċipju tad-detuzzjoni tal-errur. Il-voltiġġ tal-output minn sors tal-enerġija AC jiġi ottenut permezz ta' transformatur potenzjali, irrektifikat, poxxe, u meta jiġi misjur kont standard. Il-voltiġġ tal-errur huwa definit bħala varjazzjoni bejn il-voltiġġ reali u r-riferiment. Amplifikatur jfornixxi l-excitator prinċipali ( jew ) l-excitator pilot b'voltiġġ tal-errur ammplifikat.
Għalkemm, is-senjali tal-errur ammplifikati jiregolu l-varjazzjoni tal-voltiġġ permezz tal-kontroll tal-azzjoni buck jew boost użata biex timmeta l-excitator prinċipali jew pilot. Il-voltiġġ terminali primarji tal-alternator jiġi kkontrollat mill-kontroll tal-output tal-excitator.
Jiregola l-voltiġġ tas-sistema u japprossima l-funzjonament tal-makina għal operazzjoni stabil stazjonarja.
Idistribuixxi l-carriġa reattiva fuq l-alternaturi operattivi parallelament.
Iridda subita tal-carriġa fuq is-sistema tista' tellesta' b'voltiġġ over, li jinkisebu permezz ta' regolaturi automatiku tal-voltiġġ.
Jirringaċċja l-ekċitazzjoni tas-sistema waqt l-każijiet tal-defekt biex tkun preżenti l-enerġija massima ta' sinkronizazzjoni meta l-defekt jiġi solvit.
Il-karatteristiċi ta' regolatur automatiku tal-voltiġġ ta' ħafna ħalita huma elenkat hawn taħt:
1). Regolazzjoni tal-Voltiġġ
2). Rangu tal-Voltiġġ tal-Input











{kind=link}
{kind=link}
{kind=link}