
Un regulador automático de voltaje controla el voltaje de suministro. El voltaje se estabiliza después de ser convertido. La variación de la carga en el sistema de suministro es la causa principal de las fluctuaciones de voltaje. El equipo en el sistema de energía se ve dañado por las variaciones de voltaje.

Instalar instrumentos de control de voltaje en diversos lugares, como cerca de
Transformadores,
Generadores,
Alimentadores, etc.,
ayudará a regular la variación del voltaje.
El regulador de voltaje está disponible en varios puntos del sistema de energía para regular las fluctuaciones de voltaje.

En un sistema de suministro DC, si los alimentadores tienen todos la misma longitud, el voltaje se puede ajustar empleando varios generadores compuestos; sin embargo, si los alimentadores tienen todas longitudes diferentes, se utiliza un amplificador de alimentador para mantener un voltaje constante al final de cada alimentador. El voltaje de un sistema AC se puede regular utilizando una variedad de técnicas, incluyendo
Transformadores amplificadores,
Reguladores de inducción,
Condensadores en paralelo, etc.
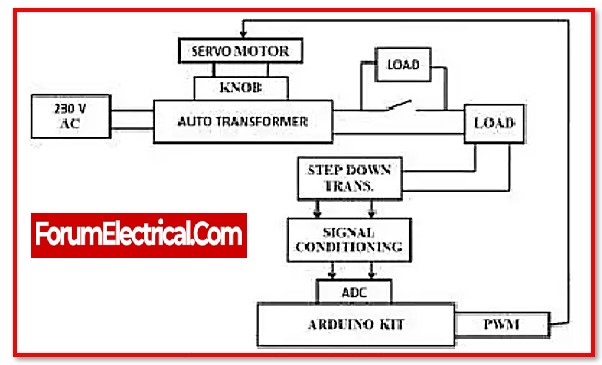
Una parte del devanado del autotransformador monofásico se divide entre el primario y el secundario. En un transformador de dos devanados, los devanados primario y secundario están eléctricamente aislados, pero no en el caso de un autotransformador. Si el voltaje aumenta, el AVR lo detecta, lo compara con el voltaje de referencia y genera una señal de error. Esta señal de error se envía luego al motor servo a través de una señal PWM por el Arduino.
Dado que el motor servo y el autotransformador están conectados, cuando el servo detecta una salida del Arduino, ambos rotan automáticamente debido al acoplamiento. A medida que el voltaje disminuye al mismo tiempo que los motores servo detectan errores, su acoplamiento aumenta el nivel de voltaje, lo que implica que el autotransformador monofásico en esta condición funciona como un sistema BUCK BOOST.

Un motor servo es similar a un motor DC y tiene ciertas partes adicionales de propósito especial que transforman un motor DC en un servo. Un pequeño motor DC, un potenciómetro, un conjunto de engranajes y electrónica avanzada son todos componentes de una unidad servo. El servo gira acoplado a la circuitería principal y al potenciómetro.

Hay un eje de salida en un motor servo. Enviar una señal codificada al servo permite que este eje se mueva a diversas posiciones angulares. El servomotor mantendrá la posición angular del eje mientras la señal esté presente en la línea de entrada. Si la señal cambia, la posición angular del eje cambia.
Dado que la unidad de acondicionamiento de señales requiere un nivel de voltaje bajo, se emplea un transformador de reducción de tensión para reducir 230 V a 5 V. El transformador reduce el nivel de voltaje para la rectificación.
El acondicionamiento de señales es el proceso de transformar una señal analógica para que cumpla con los requisitos del siguiente nivel de procesamiento. Los conversores analógico-digitales son donde se utiliza con más frecuencia. En la etapa de acondicionamiento de señales, se utilizan amplificadores operacionales para realizar la amplificación de la señal.
Al conectarlo, una fuente de alimentación CA de red puede usarse para alimentar directamente las placas Arduino. La función del regulador de voltaje es regular el voltaje suministrado a la placa Arduino y mantener los voltajes CC que se utilizan por la unidad de procesamiento y otros componentes.
Funciona según el principio de detección de errores. El voltaje de salida de una fuente de alimentación CA se obtiene utilizando un transformador de potencial, se rectifica, luego se filtra y finalmente se mide contra un estándar. El voltaje de error se define como la varianza entre el voltaje real y el de referencia. Un amplificador luego suministra al excitador principal (o) al piloto excitador con el voltaje de error amplificado.
Por lo tanto, las señales de error amplificadas regulan la variación de voltaje controlando la acción de reducción o aumento utilizada para estimular el excitador principal o el piloto. El voltaje del terminal del alternador primario se controla mediante el control de la salida del excitador.
Regula el voltaje del sistema y acerca el funcionamiento de la máquina a un estado estable de operación.
Distribuye la carga reactiva entre los alternadores operando en paralelo.
Una reducción repentina de la carga en el sistema puede llevar a sobretensiones, que son disminuidas por los reguladores automáticos de voltaje.
Aumenta la excitación del sistema durante condiciones de fallo de manera que esté presente la máxima potencia de sincronización cuando se resuelva el fallo.
Las características de un regulador automático de voltaje de alta calidad se enumeran a continuación:
1). Regulación de voltaje
2). Rango de voltaje de entrada
3). Baja impedancia
4). Compatibilidad con la carga
5). Precisión de voltaje











{kind=link}
{kind=link}
{kind=link}