
Un régulateur de tension automatique contrôle la tension d'alimentation. La tension est stabilisée après avoir été convertie. La variation de charge sur le système d'alimentation est la cause principale des fluctuations de tension. Les équipements du système électrique sont endommagés par les variations de tension.

L'installation d'instruments de contrôle de tension à différents endroits, tels que près de
Transformateurs,
Générateurs,
Alimentations, etc.,
aidera à réguler la variance de tension.
Le régulateur de tension est disponible à plusieurs points du système électrique pour réguler les fluctuations de tension.

Dans un système d'alimentation en courant continu, si les alimentations ont toutes la même longueur, la tension peut être ajustée en utilisant plusieurs générateurs composés ; cependant, si les alimentations ont toutes des longueurs différentes, un amplificateur d'alimentation est utilisé pour maintenir une tension constante à l'extrémité de chaque alimentation. La tension d'un système en courant alternatif peut être régulée en utilisant diverses techniques, y compris
Transformateurs d'amplification,
Régulateurs à induction,
Condensateurs shunt, etc.
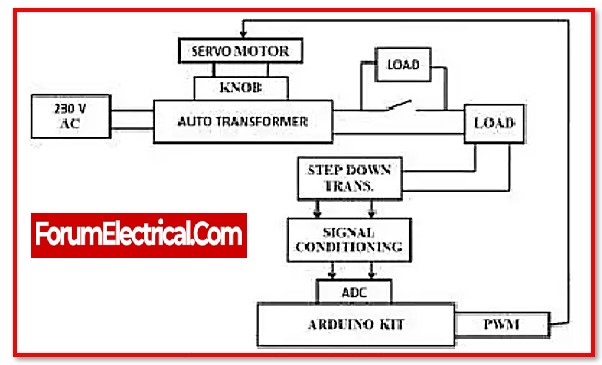
Une partie de l'enroulement de l'autotransformateur monophasé est divisée par le primaire et le secondaire. Dans un transformateur à deux enroulements, les enroulements primaire et secondaire sont électriquement isolés, mais pas dans le cas d'un autotransformateur. Si la tension augmente, l'AVR la détecte, la compare à la tension de référence et génère un signal d'erreur. Ce signal d'erreur est ensuite envoyé au moteur servo via un signal PWM par l'Arduino.
Comme le moteur servo et l'autotransformateur sont connectés, lorsque le servo détecte une sortie Arduino, les deux tournent automatiquement en raison du couplage. Alors que la tension diminue en même temps que les moteurs servo détectent des erreurs, leur couplage augmente le niveau de tension, ce qui signifie que l'autotransformateur monophasé dans cette condition fonctionne comme un système BUCK BOOST.

Un moteur servo est similaire à un moteur DC et possède certaines pièces spéciales supplémentaires qui transforment un moteur DC en un servo. Un petit moteur DC, un potentiomètre, un ensemble d'engrenages et des électroniques avancées sont tous des composants d'une unité servo. Le servo tourne couplé au circuit principal et au potentiomètre.

Il y a un arbre de sortie sur un moteur servo. L'envoi d'un signal codé au servo permet de déplacer cet arbre à différentes positions angulaires. Le servomoteur maintiendra la position angulaire de l'arbre tant que le signal est présent sur la ligne d'entrée. Si le signal change, la position angulaire de l'arbre change.
Comme l'unité de conditionnement de signal nécessite un niveau de tension faible, un transformateur abaissant est utilisé pour réduire 230 V à 5 V. Le transformateur abaisse le niveau de tension pour la redressement.
Le conditionnement de signal est le processus de transformation d'un signal analogique afin qu'il satisfasse aux exigences du niveau de traitement suivant. Les convertisseurs analogique-numérique sont là où il est le plus souvent utilisé. Au stade du conditionnement de signal, des amplificateurs opérationnels sont utilisés pour effectuer l'amplification du signal.
En le connectant, une source d'alimentation secteur AC peut être utilisée pour alimenter directement les cartes Arduino. La fonction du régulateur de tension est de réguler la tension fournie à la carte Arduino et de maintenir les tensions DC utilisées par l'unité de traitement et d'autres composants.
Il fonctionne selon le principe de détection d'erreurs. La tension de sortie d'une source d'alimentation en courant alternatif est obtenue en utilisant un transformateur de potentiel, rectifiée, puis filtrée, et ensuite mesurée par rapport à une norme. La tension d'erreur est définie comme la variance entre la tension réelle et la tension de référence. Un amplificateur fournit ensuite l'exciteur principal (ou) l'exciteur pilote avec la tension d'erreur amplifiée.
Par conséquent, les signaux d'erreur amplifiés régulent la variation de tension en contrôlant l'action de réduction ou d'augmentation utilisée pour stimuler l'exciteur principal ou l'exciteur pilote. La tension de sortie de l'alternateur principal est contrôlée par le contrôle de sortie de l'exciteur.
Il régule la tension du système et rapproche le fonctionnement de la machine d'un état stable.
Il distribue la charge réactive entre les alternateurs en parallèle.
Une réduction soudaine de la charge sur le système peut entraîner des surtensions, qui sont réduites par les régulateurs de tension automatiques.
Il augmente l'excitation du système en cas de défaut afin que la puissance de synchronisation maximale soit présente lorsque le défaut est éliminé.
Les caractéristiques d'un régulateur de tension automatique de haute qualité sont énumérées ci-dessous :
1). Régulation de tension
2). Plage de tension d'entrée
3). Faible impédance
4). Compatibilité de charge
5). Précision de tension











{kind=link}
{kind=link}
{kind=link}