
Aŭtomata tensio regulilo kontrolos la alprovizadon de tensio. La tensio estas stabiligita post konverto. La variado en lasto sur la alprovizadsistemo estas la ĉefa kaŭzo de la tensiofluktuoj. La ekipaĵo en la energisistemo estas danĝerigita de tensiovariadoj.

Instalado de tensiokontroliloj en diversaj lokoj, ekzemple proksime de
Transformiloj,
Generiloj,
Alprovizadkonduktoroj, ktp.,
helpos reguli tensiovariadojn.
La tensioregulilo disponeblas je pluraj punktoj en la energisistemo por reguli tensiofluktuojn.

En DC-alprovizadsistemo, se la alprovizadkonduktoroj estas ĉiuj de sama longo, la tensio povas esti regula per uzo de kelkaj kombinaj generiloj; tamen, se la alprovizadkonduktoroj estas ĉiuj de malsama longo, alprovizadkonduktora stimulilo estas uzata por teni konstantan tension ĉe la fino de ĉiu alprovizadkonduktoro. La tensio de AC-sistemo povas esti regula per diversaj teknikoj, inkluzive de
Stimultransformiloj,
Induktoreguliloj,
Paralelaj kondensiloj, ktp.
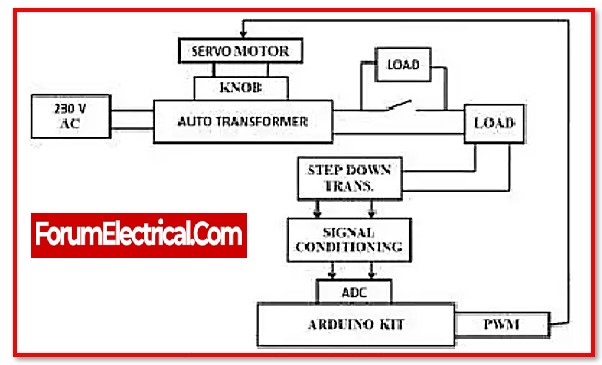
Parto de la ventilo de unufaza autotransformilo estas dividita de la primara kaj sekundara. En duventila transformilo, la primara & sekundara ventiloj estas elektrike izolitaj, sed ne en la stato de autotransformilo. Se la tensio pligrandigas, la AVR detektas ĝin, komparas ĝin kun la referenca tensio, kaj generas erarsignalon. Tiu erarsignalo tiam estas sendata al la servomotoro per PWM-signalo de la Arduino.
Ĉar la servomotoro kaj autotransformilo estas konektitaj, kiam la servo detektas Arduinon eldonon, ambaŭ turniĝas aŭtomate pro la kunligo. Kiel tensio malpligrandigas samtempe kiel servomotoroj detektas erarojn, ilia kunligo pligrandigas la nivelon de tensio, kio signifas, ke la 1-faza autotransformilo en tiu stato funkcias kiel BUCK BOOST sistemo.

Servomotoro similas al DC-motoro kaj havas certajn aldonajn specialajn partojn, kiuj transformas DC-motoron en servon. Malgranda DC-motoro & potenciometro, radoaranĝo, kaj avancitaj elektroniko estas ĉiuj komponantoj de servo-unuo. La servo turniĝas kunligite al la ĉefcirkvito kaj potenciometro.

Estas eligoakso sur servomotoro. Sendado de kodita signalo al la servo permesis al tiu akso moviĝi al diversaj angulaj pozicioj. La servomotoro daŭrigos la angulan pozicion de la akso tiom longe, dum la signalo estas sur la eniga linio. Se la signalo ŝanĝiĝas, la angula pozicio de la akso ŝanĝiĝas.
Ĉar la signal-kondiĉigunuo postulas malaltan tension, step down transformilo estas uzata por redukti 230 V al 5 V. La transformilo reduktas la tensiomatron por rektifikado.
Signal-kondiĉigo estas la procezo de transformado de analoga signalo, tiel ke ĝi kontentigas la postulojn por la sekva nivelo de prilaborado. Analogaj al digitalaj konvertiloj estas kie ĝi plej ofte estas uzata. En la signal-kondiĉigetape, operaciumplifikiloj estas uzataj por efektivigi la amplifikadon de la signalo.
Per ĝia konektado, AC-mains energofonto povas esti uzata por energizi Arduino-plankoje direktmanieron. La funkcio de la tensioregulilo estas reguli la tension provizitan al la Arduino-planko & manteni la DC-tension, kiun uzas la prilaborada unuo & aliaj komponantoj.
Ĝi funkcias laŭ la principo de erardetekto. La eligo-tensio de AC-energofonto estas ricevita per potencialtransformilo, rektifikita, tiam filtrita, kaj tiam ĝi estas mezurita kontraŭ normo. La erartensio estas difinita kiel la varianco inter la efektiva kaj referencatensioj. Amplifikilo tiam provizas la ĉefstimulilon (aŭ) pilotstimulilon kun la amplifikita erartensio.
Do, la amplifikitaj erarsignaloj regulas la tensiovariadon per kontrolo de la buck aŭ boost ago uzata por stimuli la ĉefan aŭ pilotstimulilon. La ĉefalternatora terminala tensio estas kontrolata per la stimulilo eligo-kontrolo.
Ĝi regulas la sistemtension kaj proksimigas la maŝinfunkcion al stabila staga funkciado.
Ĝi distribuas la reaktivan laston trans paralele funkciantaj alterniloj.
Subita malpligrandiĝo de lasto en la sistemo povas konduki al supertensioj, kiuj estas malpligrandigitaj per aŭtomataj tensioreguliloj.
Ĝi pligrandigas la sistemelektrigon dum defektaj kondiĉoj, tiel ke maksimuma sinkronigforto estas prezentata kiam la defekto estas forigita.
La karakterizoj de alta kvalita aŭtomata tensioregulilo estas listigitaj sube:
1). Tensioregulado
2). Eniga tensiomatro
3). Malalta impedanco
4). Lastkompatibileco











{kind=link}
{kind=link}
{kind=link}