
Automātiskais sprieguma regultors kontrolē piegādes spriegumu. Spriegums tiek stabilizēts pēc tā pārveidošanas. Piegādes sistēmas slodzes maiņa ir galvenais sprieguma svārstību cēlonis. Elektrosistēmas ierīces tiek kaitētas no sprieguma maiņas.

Sprieguma kontrolējošo ierīču instalēšana dažādās vietās, piemēram, tuvumā
Transformatoriem,
Ģeneratoriem,
Piegādes līnijām u.c.,
palīdzēs regulēt sprieguma variacijas.
Sprieguma regultors ir pieejams vairākos punktos elektrosistēmā, lai regulētu sprieguma svārstības.

DC piegādes sistēmā, ja piegādes līnijas ir vienādas garumā, spriegumu var pielāgot, izmantojot vairākus savienotos ģeneratorus; tomēr, ja piegādes līnijas ir dažādas garumā, izmanto tiek piegādes līniju pastiprinātājs, lai nodrošinātu konsekventus spriegumu katras piegādes līnijas beigās. AC sistēmas spriegumu var regulēt, izmantojot dažādas metodes, tostarp
Pastiprināto transformatoru,
Indukcijas regultoru,
Paralēlos kondensatorus u.c.
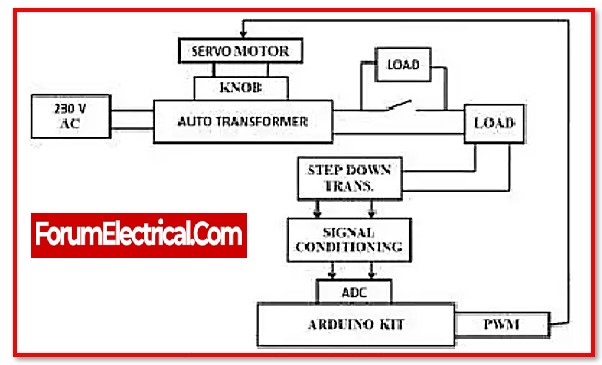
Daļa vienfazā autotransformatora vaiļņa ir sadalīta primārajā un sekundārajā. Divvaiļņa transformatorā primārie un sekundārie vaiļņi ir elektriski atdalīti, bet ne autotransformatora stāvoklī. Ja spriegums palielinās, AVR to uztver, salīdzina ar standarta spriegumu un ģenerē kļūdas signālu. Šis kļūdas signāls tiek nosūtīts servomotoram, izmantojot PWM signālu no Arduino.
Tā kā servomotors un autotransformators ir savienoti, kad servomotors uztver Arduino izvadi, abi automātiski rotē, jo tie ir savietoti. Kad spriegums samazinās, tajā pašā laikā servomotori uztver kļūdas, to savietojums palielina sprieguma līmeni, kas nozīmē, ka 1-faza autotransformators šajā stāvoklī darbojas kā BUCK BOOST sistēma.

Servomotors ir līdzīgs DC motoram un to papildina noteiktas īpašas detaļas, kas pārvērš DC motoru par servomotoru. Mazi DC motors, potenciometrs, dzirksteles shēma un moderna elektronika ir visi servounīta komponenti. Servomotors rotē, savienots ar galveno shēmu un potenciometru.

Servomotoram ir izvades vaļsts. Nosūtot kodētu signālu servomotoram, šo vaļstu var pārvietot uz dažādiem leņķa pozīcijām. Servomotors saglabās vaļsta leņķa pozīciju tik ilgi, kamēr signāls ir ievades līnijā. Ja signāls mainās, vaļsta leņķa pozīcija mainās.
Kā signalu apstrādes vienība prasa zemu sprieguma līmeni, izmanto sprieguma samazinošo transformatoru, lai samazinātu 230 V uz 5 V. Transformators samazina sprieguma līmeni rektifikācijai.
Signāla apstrāde ir process, kurā analoģskaitlisks signāls tiek pārveidots, lai tas atbilstu nākamā procesēšanas līmeņa prasībām. Analogo-digi











{kind=link}
{kind=link}
{kind=link}