
Automatický napěťový regulátor ovládá dodávací napětí. Napětí je stabilizováno po převodu. Variace zatížení v dodávacím systému je hlavní příčinou fluktuací napětí. Zařízení v elektrickém systému je poškozováno změnami napětí.

Instalace napěťových kontrolních přístrojů na různých místech, jako je například blízko
Transformátorů,
Generátorů,
Vedení apod.,
helpí regulovat variaci napětí.
Napěťový regulátor je k dispozici v několika bodech elektrického systému pro regulaci fluktuací napětí.

V DC dodávacím systému, pokud jsou všechny vedlejší vedení stejně dlouhá, lze napětí upravit použitím několika komplexních generátorů; pokud jsou všechny vedlejší vedení různé délky, používá se zesilovač vedlejšího vedení k udržení konstantního napětí na konci každého vedlejšího vedení. Napětí AC systému lze regulovat pomocí různých technik, včetně
Zesilovačů transformátorů,
Indukčních regulátorů,
Shunt kondenzérů atd.
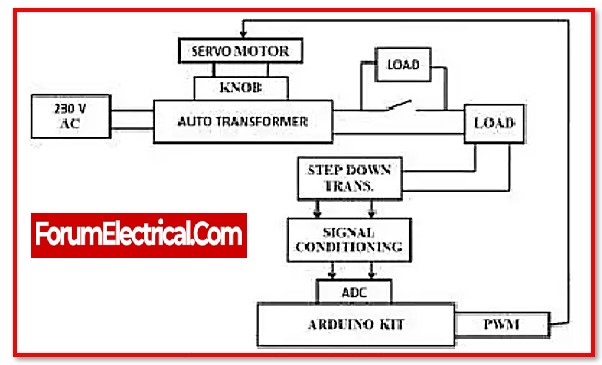
Část cívek jednofázového autotransformátoru je rozdělena primárním a sekundárním obvodem. V transformátoru s dvěma cívkami jsou primární a sekundární cívky elektricky izolovány, ale ne v případě autotransformátoru. Pokud napětí stoupne, AVR to detekuje, porovná ho s referenčním napětím a vygeneruje signál chyby. Tento signál chyby je pak odeslán servomotoru prostřednictvím PWM signálu od Arduino.
Protože servomotor a autotransformátor jsou spojeny, když servomotor detekuje výstup z Arduino, oba se automaticky otáčejí díky spojení. Když napětí klesne současně s tím, jak servomotory detekují chyby, jejich spojení zvyšuje úroveň napětí, což znamená, že 1-fázový autotransformátor v této situaci funguje jako BUCK BOOST systém.

Servomotor je podobný DC motoru a má určité dodatečné speciální části, které DC motor proměňují v servomotor. Malý DC motor, potenciometr, ozubené spojení a pokročilé elektronické komponenty jsou všechny součásti servounit. Servo se otáčí spojené s hlavními obvody a potenciometrem.

Na servomotoru je výstupní hřídel. Odeslání zakódovaného signálu do serva umožnilo pohyb této hřídele do různých úhlových pozic. Servomotor udržuje úhlovou pozici hřídele, dokud je signál na vstupní linii. Pokud se signál změní, změní se i úhlová pozice hřídele.
Jelikož jednotka pro zpracování signálů vyžaduje nízkou úroveň napětí, používá se step down transformátor k snížení 230 V na 5 V. Transformátor snižuje úroveň napětí pro rectifikaci.
Zpracování signálů je proces transformace analogového signálu tak, aby splňoval požadavky pro následující stupeň zpracování. Analogově-digitální převodníky jsou místa, kde se nejčastěji používají. V fázi zpracování signálů se k provedení zesílení signálu používají operační zesilovače.
Připojením je možné použít síťové zdroje AC k přímo napájení desek Arduino. Funkcí napěťového regulátoru je regulace napětí dodávaného na desku Arduino a udržování DC napětí používaného v procesorové jednotce a dalších komponentách.
Funguje podle principu detekce chyb. Výstupní napětí z AC zdroje je získáno pomocí potenciálního transformátoru, rectifikováno, pak filtrují a měří se proti standardu. Chybové napětí je definováno jako rozdíl mezi skutečným a referenčním napětím. Zesilovač pak dodává hlavnímu exciteru (nebo) pilotnímu exciteru zesílené chybové napětí.
Tedy zesílené signály chyb regulují variaci napětí ovládáním akce buck nebo boost, která stimuluje hlavní nebo pilotní exciter. Primární napětí na terminále alternátoru je řízeno výstupním řízením excitru.
Reguluje napětí systému a přibližuje funkci strojů ke stabilnímu stavu.
Distribuuje reaktivní zátěž mezi paralelně pracujícími alternátory.
Náhlé snížení zátěže v systému může vést k přetlakům, které jsou snižovány automatickými napěťovými regulátory.
Zvyšuje exicitaci systému za podmínek poruch tak, aby byla přítomna maximální synchronizační síla, když je porucha odstraněna.
Charakteristiky vysokokvalitního automatického napěťového regulátoru jsou uvedeny níže:
1). Regulace napětí
2). Rozsah vstupního napětí
3). Nízká impedancí











{kind=link}
{kind=link}
{kind=link}