
Automaatne spikkeltenn kontrollib toitepinget. Pinge stabiliseeritakse pärast teisendamist. Toitesüsteemi laadimuse muutus on pingeheletuse peamine põhjus. Energiasüsteemi seadmetel kahjustab pingemuutused.

Pingejuhiste paigaldamine erinevates kohtades, näiteks lähedal
Tehnikutele,
Generaatoritele,
Kanalitele jne.,
aitab reguleerida pingemuutusi.
Pingejuhist on saadaval mitmes punktis energiasüsteemis, et reguleerida pingemuutusi.

DC-toitepingesüsteemis, kui kanalid on kõik sama pikkused, saab pinget reguleerida kasutades mitmeid komplekssete generaatorite. Kuid kui kanalid on kõik erinevat pikkust, kasutatakse kanali tõstjat, et hoida igas kanali lõpus konstantne pinge. AC-süsteemi pinget saab reguleerida kasutades mitmeid tehnikaid, sealhulgas
Tõstjatehnika,
Induktsiooniregulaatorid,
Paralleelkondensaatorid jne.
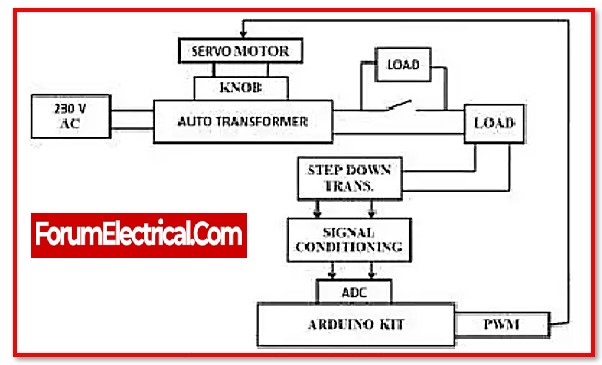
Ühefaasi autotransformatori keert osaks jagatakse primaarse ja sekundaarse vahel. Kahekeerulis transformaatoris on primaar- ja sekundaarkeerud elektriliselt isoleeritud, kuid mitte autotransformatori korral. Kui pinge suureneb, tuvastab AVR selle, võrdleb seda viitepingega ja genereerib veasiini. See veasiin saadetakse siis servomootori juurde PWM signaali kaudu Arduino poolt.
Kuna servomootor ja autotransformator on ühendatud, siis kui servomootor tuvastab Arduino väljundit, keerlevad mõlemad automaatselt koppeltingimuse tõttu. Kui pinge langedes servomootorid tuvastavad veasiini, suurendab nende koppeltingimus pinget, mis tähendab, et 1-faasi autotransformator selles olukorras töötab BUCK BOOST süsteemina.

Servomootor on sarnane DC-mootoriga ja sisaldab mõnda lisandlikku erialalist osa, mis teeb DC-mootorist servomootori. Väike DC-mootor, potentsiomeeter, tahrepaigutus ja eduka elektronika on kõik servouniidi komponendid. Servo keerleb ühenduses peamise tsirkuitiga ja potentsiomeetri.

Servomootoril on väljundtelg. Kooditud signaali saatmine servomootorile lubas selle telje liigutada erinevatesse nurkpositsioonidesse. Servomootor hoiab telje nurkpositsiooni, nii kaua kuni signaal on sisendjoonel. Kui signaal muutub, muutub ka telje nurkpositsioon.
Kuna signaalitingimuse üksus nõuab madalat pinget, kasutatakse alandustransformatorit, et vähendada 230 V 5 V-le. Transformatuur alandab pinget rektifitsemiseks.
Signaalitingimine on analoogsignaali muundamise protsess, et see rahuldaks järgmise töötlemistaseme nõuded. Analoog-digitaalsed teisendajad on kõige sagedamini kasutatud signaalitingimise etapis. Signaali tugevdamiseks kasutatakse operatsioonilisi tugevdatavaid.
Selle ühendamisel saab AC põhivoolu allikat kasutada Arduino platvormide otse hooldamiseks. Pingereegulaatori ülesanne on reguleerida Arduino platvormile tarnitavat pinget ja säilitada töötlemise üksuse ja muude komponentide kasutuselevaatuse DC-pinged.
See töötab vea tuvastamise printsiibil. AC-põhivooluallika väljundpinge saadakse potentsiaaltransformaatori abil, seejärel rektifitseeritakse, filtreeritakse ja seejärel mõõdetakse standardiga. Veapinge määratakse tegeliku ja viitepinge vahe kui. Tugevdaja tarnib seejärel peamise või pilootveosturi tugevdatud veapingega.
Seega reguleerivad tugevdatud veasiinid pingemuutust, kontrollides buck-i või boost-tegevust, mida kasutatakse peamise või pilootveosturi stimuleerimiseks. Alternatori esmane terminaalpinge reguleeritakse veosturi väljundkontrolli kaudu.
See reguleerib süsteemi pinget ja lähendab masina funktsioneerimist stabiilsele tasakaalustatud seisundile.
See jagab reaktiivset laadi paralleelselt töötavate alternatorite vahel.
Süsteemis tekkinud laadimuse ootamatult vähenemine võib põhjustada ülepingeid, mida vähendavad automaatse spikkeltenni (AVR).
See suurendab süsteemi veostust vigade tingimustes, et oleks maksimaalne sinkroniseerimise võim vigade lahendamisel.
Järgnevad on kõrgetasemelise automaatse spikkeltenni omadused:
1). Pinge reguleerimine
2). Sisendpinge ulatus
3). Madal impedants
4). Laadimise ühilduvus
5). Pinge täpsus











{kind=link}
{kind=link}
{kind=link}