
自動電圧調整器は供給電圧を制御します。変換された後、電圧が安定化されます。供給システムの負荷の変動が電圧の変動の主な原因です。電力システム内の設備は電圧の変動によって損傷を受けます。

トランスフォーマーや発電機、フィーダーなど、さまざまな場所に電圧制御装置を設置することで
トランスフォーマー、
発電機、
フィーダーなど、
電圧の変動を制御するのに役立ちます。
電圧調整器は、電力システムの複数のポイントで利用可能であり、電圧の変動を制御します。

DC供給システムでは、すべてのフィーダーの長さが同じ場合、複数の複合発電機を使用して電圧を調整できます。しかし、すべてのフィーダーの長さが異なる場合、フィーダーブースターを使用して各フィーダーの端で一定の電圧を維持します。ACシステムの電圧は、以下のような様々な技術を使用して制御できます。
ブースタートランスフォーマー、
誘導調整器、
並列コンデンサーなど。
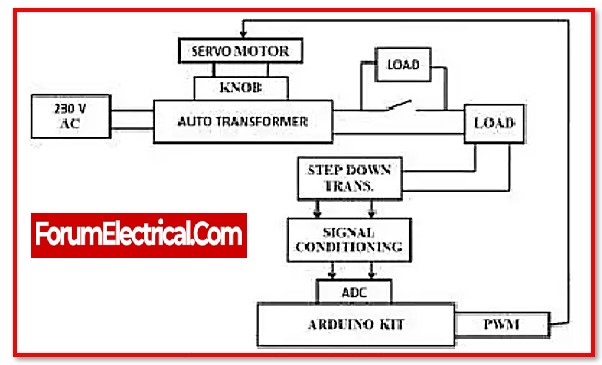
単相オートトランスフォーマーの巻線の一部は、一次側と二次側に分割されています。二巻線トランスフォーマーでは、一次巻線と二次巻線は電気的に絶縁されていますが、オートトランスフォーマーの状態ではありません。電圧が上昇すると、AVRはそれを検出し、基準電圧と比較し、エラーシグナルを生成します。このエラーシグナルは、ArduinoによってPWM信号を介してサーボモータに送られます。
サーボモータとオートトランスフォーマーが接続されているため、サーボがArduinoの出力を検出したとき、両方が結合により自動的に回転します。電圧が下がるのと同時にサーボモータがエラーを検出すると、その結合により電圧レベルが上昇します。これは、この条件での1相オートトランスフォーマーがバッキング・ブースティングシステムとして機能することを意味します。

サーボモータはDCモータに似ていますが、DCモータをサーボに変える特定の特別な部品を持っています。小さなDCモータとポテンショメータ、ギア機構、高度な電子部品はすべてサーボユニットの構成要素です。サーボはメイン回路とポテンショメータに結合して回転します。

サーボモータには出力軸があります。コード化された信号をサーボに送ることで、この軸をさまざまな角度位置に移動することができます。サーボモータは、入力線上に信号がある限り、軸の角度位置を維持します。信号が変わると、軸の角度位置も変わります。
信号処理ユニットが低電圧レベルを必要とするため、ステップダウントランスフォーマーを使用して230Vを5Vに減らします。トランスフォーマーは整流のために電圧レベルを下げます。
信号処理とは、アナログ信号を変換して、次の処理レベルの要件を満たすプロセスです。最も頻繁に使用されるのは、アナログからデジタルへの変換器です。信号処理段階では、演算増幅器を使用して信号の増幅を行います。
これに接続することで、ACの商用電源を使用して直接Arduinoボードを動作させることができます。電圧調整器の機能は、Arduinoボードに供給される電圧を調整し、処理ユニットや他のコンポーネントで使用されるDC電圧を維持することです。
これは誤差検出の原則に基づいて機能します。AC電源の出力電圧は、電位変換器を使用して得られ、整流され、フィルタリングされ、その後標準と比較されます。誤差電圧は、実際の電圧と基準電圧の間の偏差として定義されます。アンプリファイアは、増幅された誤差電圧を主励磁器またはパイロット励磁器に供給します。
したがって、増幅された誤差信号は、主またはパイロット励磁器を刺激するために使用されるバッキングまたはブースティングアクションを制御することにより、電圧の変動を制御します。主発電機の端子電圧は、励磁器の出力制御によって制御されます。
システムの電圧を制御し、機械の動作を安定した定常運転に近づけます。
並列運転する発電機間でリアクティブ負荷を分配します。
システム上の負荷の急激な減少により生じる過電圧は、自動電圧調整器によって減少します。
障害条件下でシステムの励磁を上げることで、障害が解消されたときに最大同期電力を確保します。
高品質の自動電圧調整器の特性は以下の通りです:
1). 電圧調整
2). 入力電圧範囲
3). 低インピーダンス
4). 負荷適合性
5). 電圧精度











{kind=link}
{kind=link}
{kind=link}