
Ein automatischer Spannungsregler steuert die Versorgungsspannung. Die Spannung wird nach der Umwandlung stabilisiert. Die Variation des Lastzustands im Versorgungssystem ist die Hauptursache für Spannungsschwankungen. Die Ausrüstung im Stromnetz wird durch Spannungsschwankungen geschädigt.

Die Installation von Spannungssteuerungsinstrumenten an verschiedenen Orten, wie in der Nähe von
Transformern,
Generatoren,
Speiseleitungen usw.,
hilft, die Spannungsschwankungen zu regulieren.
Der Spannungsregler ist an mehreren Punkten im Stromnetz verfügbar, um Spannungsschwankungen zu regulieren.

In einem Gleichstromversorgungssystem kann die Spannung angepasst werden, indem mehrere zusammengesetzte Generatoren eingesetzt werden, wenn alle Speiseleitungen die gleiche Länge haben. Wenn jedoch alle Speiseleitungen unterschiedliche Längen haben, wird ein Speiseleitungsbooster verwendet, um eine konstante Spannung am Ende jeder Speiseleitung aufrechtzuerhalten. Die Spannung eines Wechselstromsystems kann mit einer Vielzahl von Techniken reguliert werden, darunter
Boostertransformer,
Induktionsregler,
Shunt-Kondensatoren usw.
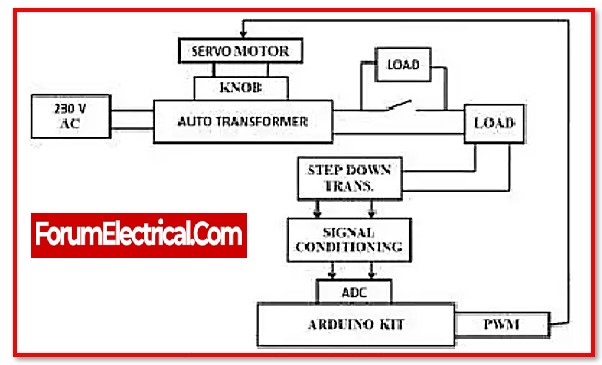
Ein Teil der Wicklung des Einphasen-Autotransformers wird durch das Primär- und Sekundärwindung geteilt. Bei einem Zweifachwicklungs-Transformer sind die Primär- und Sekundärwindungen elektrisch isoliert, aber nicht im Zustand eines Autotransformers. Wenn die Spannung zunimmt, erkennt der AVR dies, vergleicht sie mit der Referenzspannung und generiert ein Fehlersignal. Dieses Fehlersignal wird dann über ein PWM-Signal vom Arduino an den Servomotor gesendet.
Da der Servomotor und der Autotransformer verbunden sind, drehen sich beide automatisch, wenn der Servo ein Arduino-Signal erkennt, aufgrund der Kopplung. Während die Spannung fällt, erkennen die Servomotoren Fehler, was zur Erhöhung der Spannung führt. Dies bedeutet, dass der Einphasen-Autotransformer in diesem Zustand als BUCK BOOST-System funktioniert.

Ein Servomotor ist ähnlich wie ein Gleichstrommotor und verfügt über bestimmte zusätzliche spezielle Teile, die einen Gleichstrommotor in einen Servomotor verwandeln. Ein kleiner Gleichstrommotor, ein Potentiometer, eine Getriebeanordnung und fortschrittliche Elektronik sind alle Komponenten einer Servoeinheit. Der Servomotor dreht sich gekoppelt an der Hauptschaltung und dem Potentiometer.

Es gibt einen Ausgangswellenzapfen am Servomotor. Das Senden eines codierten Signals an den Servo ermöglicht es, diesen Zapfen in verschiedene Winkelpositionen zu bewegen. Der Servomotor behält die Winkelposition des Zapfens so lange bei, wie das Signal an der Eingangsleitung vorhanden ist. Wenn sich das Signal ändert, ändert sich auch die Winkelposition des Zapfens.
Da die Signalbedingungseinheit eine niedrige Spannungsebene erfordert, wird ein Spannungsabfall-Transformer verwendet, um 230 V auf 5 V zu reduzieren. Der Transformer senkt die Spannungsebene für die Rechteckung herab.
Signalbedingung ist der Prozess, ein Analogsignal so zu transformieren, dass es den Anforderungen für die nächste Verarbeitungsstufe entspricht. Analog-Digital-Wandler sind der häufigste Einsatzort. In der Signalbedingungsphase werden Operationsverstärker verwendet, um die Verstärkung des Signals durchzuführen.
Durch die Verbindung kann eine AC-Haupthausstromquelle direkt zum Betrieb von Arduino-Platinen verwendet werden. Die Funktion des Spannungsreglers besteht darin, die Spannung, die an die Arduino-Platine geliefert wird, zu regeln und die Gleichspannungen, die von der Verarbeitungseinheit und anderen Komponenten verwendet werden, aufrechtzuerhalten.
Er funktioniert nach dem Prinzip der Fehlererkennung. Die Ausgangsspannung einer Wechselstromquelle wird mithilfe eines Potentialtransformers erfasst, rechteckig gemacht, gefiltert und dann gegen einen Standard gemessen. Die Fehlerspannung wird definiert als die Abweichung zwischen der tatsächlichen und der Referenzspannung. Ein Verstärker liefert dann den Haupt- oder Pilotanreger mit der verstärkten Fehlerspannung.
Die verstärkten Fehlersignale regeln daher die Spannungsschwankungen, indem sie die Buck- oder Boost-Aktion steuern, die zum Anregen des Haupt- oder Pilotanregers verwendet wird. Die Primärspannung am Generatoranschluss wird durch die Steuerung des Anregerausgangs kontrolliert.
Er regelt die Systemspannung und bringt die Maschinenfunktion näher an einen stabilen stationären Betrieb.
Er verteilt die Blindlast auf die parallel betriebenen Alternatoren.
Ein plötzlicher Lastabfall im System kann zu Überspannungen führen, die durch automatische Spannungsregler reduziert werden.
Er erhöht die Systemerregung bei Störungen, sodass die maximale Synchronisierleistung vorhanden ist, wenn die Störung beseitigt wird.
Die Eigenschaften eines hochwertigen automatischen Spannungsreglers sind unten aufgelistet:
1). Spannungsregulierung
2). Eingangsspannungsbereich
3). Niedriger Widerstand
4). Lastkompatibilität
5). Spannungsgenauigkeit











{kind=link}
{kind=link}
{kind=link}