
Galvenā problēma tiešsaistes kabeļu ekscentricitātes mērīšanā ir kabeļa augstā ātrumu. Tas prasa nesakarus mērīšanas iekārtas, kas var apstrādāt kabeļa vibrācijas. Rentes kabeļu ekscentrimetri, kas balstīti uz optiskās pārraides attēlošanu, mēra daudzslāņu kontūras dimensijas, lai aprēķinātu vadijumu ģeometriskā centra izkliedes attiecībā pret izolācijas ekscentricitāti. Tomēr tiem ir trūkumi: lēns mērījuma ātrums ( tikai dažas reizes sekundē), pieaugošas kļūdas no kabeļa vibrācijām un augsti izmaksas.
1 Elektromagnētiskā indukcija balstīto kabeļu ekscentrimetru princips
Elektromagnētiskā indukcija balstītie kabeļu ekscentrimetri savieno optisko diametra mērījumu un elektromagnētisko indukciju vadijuma detektācijai. Tie mēra vadijuma elektriskā centra (labāks nekā ģeometriska ekscentricitāte) ar augstu ātrumu tūkstošiem mērījumu sekundē. Straujāks mērījums samazina vibrācijas ietekmi, aizstājot rentes ierīces situācijās, kur nav nepieciešams daudzslāņu dimensiju mērījums.
Pašreizējie importētie produkti (atkarībā no publiskajiem principiem) izmanto četrus indukcijas spēku cilvēkus, lai detektētu magnētiskos laukus (kā Figurā 1). Daži nosaka vadijuma centrāciju, izmantojot vienādu signāla stiprumu (ja neatbilst, tad reglamentē logu ar motoriem); citi aprēķina vadijuma centru, pamatojoties uz detektēto signāla stiprumu.

2 Mērījuma precizitātes kontrolēšana
Motoru pielāgošana ietver procesu, kas neizbēgami rada aizkavējumu. Tas ved pie desinhronizācijas starp izolāciju un vadijuma mērījumiem, radot aizkavējuma kļūdas - lielākas kabeļa vibrācijas rada lielākas kļūdas. Praktiski šis defekts manifestējas: ja notiek kabeļa vibrācija, ekscentricitātes mērījumu rezultāti kļūst nestabili, ar svārstībām, kas pārsniedz 1%. Tas atspoguļo ierīces mērījuma kļūdu, nevis faktisko kabeļa stāvokli.
Tomēr vadijuma centrācijas novērtēšana, pamatojoties uz vienādu signāla stiprumu, nav vienmēr derīga. Biot-Savart likums nosaka: magnētiskā indukcijas intensitāte (B), kas izraisīta strāvas elementu Idl jebkurā telpas punktā attālumā r, ir:

Šis formulējums norāda, ka magnētiskā indukcijas intensitāte ir inversi proporcionāla attāluma kvadrātam un proporcionāla leņķa sinusu θ, kā parādīts Figurā 2.

Balstoties uz šo, tiek veikts simulācijas aprēķins par magnētiskā lauka intensitātes attiecību četros telpas punktos. Lai nodrošinātu vieglumu, tiek izveidots modelis, kā parādīts Figurā 3.

Punkti 1, 2, 3 un 4 ir ortogonāli un simetriki sadalīti, ar O kā centrālo punktu. Ļaujiet strāvas elementam kustēties pa ass 2 un 3 vidusliniju OP. Saskaņā ar Formulu (1), kad strāvas elements atrodas jebkurā punktā uz OP, B1 = B4 un B2 = B3. Tātad, jāizpēta tikai B1/B2 izmaiņas ar ∠θ. Pēc aprēķina tiek iegūta datu sadales tabula un izveidots punktu tendences grafiks, kā parādīts Tabulā 1 un Figurā 4.

Kā redzams Figurā 4, tendence ir neregulāra līkne. Kad ∠θ palielinās, B1/B2 samazinās no 1 līdz aptuveni 0.268 (minimālais), pēc tam atkal palielinās līdz 1. Kamēr magnētiskie lauki četros punktos vienādojas, strāvas elements atrodas tālu no centrālā punkta O. Intervālā katrs vērtība (izņemot minimālo) ir divos punktos - tuvāk minimālam, punkti ir tuvāk.
Šis piemērs attiecas uz vienu kvadrantu, un tas pati ir spēkā arī citiem. Atkarība no četrpunktīgā magnētiskā lauka magnitūdēm nevar novērtēt vadijuma centrāciju vai noteikt tā centru (magnētiskais lauks ir vektors, nevis skalārs).
Tātad, lai izstrādātu labāku ekscentrimetru, jāizvairās no blinda sekot ārzemju uzņēmumiem. Jauns princips: mērīt magnētiskā lauka virziena leņķus θ₁, θ₂ punktos P₁/P₂, lai noteiktu avota centrālo punktu O (Figurā 5).

Šis princips ģeometriski apkopots kā: trijstūris ir viennozīmīgi noteikts ar vienu malu un diviem blakusleņķiem. Lai gan šis ir spēkā, praktiska realizācija prasa augstāko ātrumu un precizitāti, lai mērītu vājus magnētiskos laukus.
Kabeļu vadijumi izraisa aptuveni 10mA strāvu ārējos maiņstrāvas laukos. Sensori, kas atdalīti no kabeļiem, detektē vājus (~desmitiem nT) laukus - prasām augstu jūtību, frekvences atbildi un zemu troksni (inherentais troksnis ietekmē precizitāti).
3 Elektromagnētiskā indukcija balstīto ekscentrimetru realizācija
Lielākā daļa importēto produktu izmanto spēku sensorus; šajā rakstā tiek izvēlēti magnetorezistīvās sensori. Mazie sensori integre visus elektromagnētiskos un optiskos mērījumus uz viena šķērsgrieziena (samazinot kļūdas), ar augstu sensoru saskanību. Litogrāfijas balstīti magnetorezistīvie sensori ir ideāli. Salīdzinājumā ar importētajiem spēku sensoru produktiem, kas atdalā mērījumus, uzskatot netoptiskus vadijumu segmentus par vienādiem - palielinot kļūdas.
Magnetorezistīvās mērījumu: 1000/s mērījumi, ±2% atkārtotība (100-200nT), ±0.2% 1000-mērījumu vidēji, lineāritāte <0.5%. Salīdzinājumi ar importētajiem ir ierobežoti (nav datu).
Savienojot ar ātru LED×CCD optisko mērījumu, iespējama reāllaika ekscentricitātes mērīšana (Figurā 6).
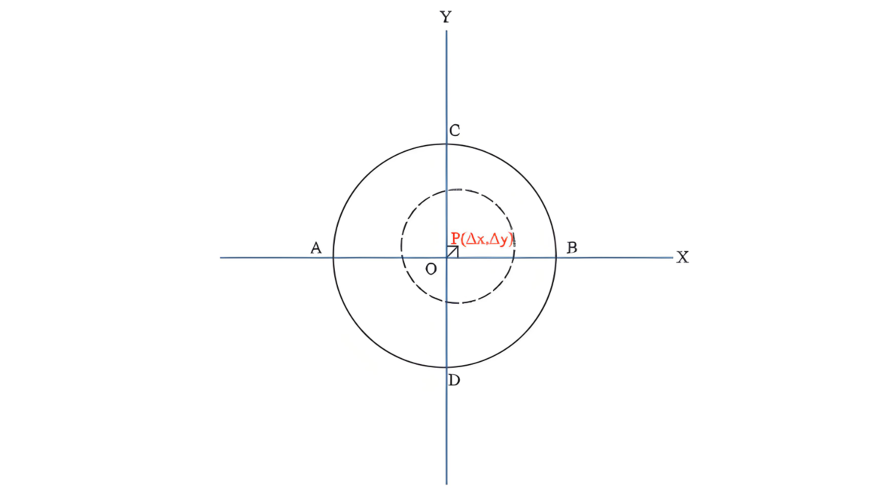
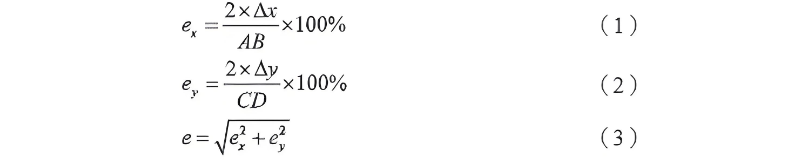
Katram mērījumam tiek synchroniski iegūtas četru punktu (A, B, C, D) pozīcijas izolācijas slānī un vadijuma centra punkta P pozīcija. Ekscentricitātes X un Y virzienos un kopējā ekscentricitāte tiek aprēķinātas, izmantojot šādas formulas:
Katram mērījumam ex, ey un e tiek vidējojamas (pār noteiktu paraugu skaitu) kā galīgais ekscentricitātes rezultāts. Lai parādītu koncentricitāti, izmanto Concentricity = 1 - Eccentricity. Δx/Δy (X/Y virziena novirzes) ļauj reāllaika ekstrudera galvenes pielāgošanu, lai automātiski korektētu kabeļa ekscentricitāti.
Straujāki mērījumu ātrumi samazina vibrācijas kļūdas: 1000 mērījumi sekundē sasniedz tūkstošdaļu precizitāti. Lielākā daļa importēto produktu (simti mērījumi sekundē) apgalvo ekscentricitātes precizitāti, pieņemot centrālu vadijumu (atbilstoši ārējam diametra precizitātei, dota kā ±μm absolūtās vērtības, nevis procenti - neatbilstoši).
3.1 LED×CCD diametra mērījums
Balstoties uz telecentriskajiem optikas principiem, tā izmanto gaismas bloķēšanu, lai izveidotu CCD gājenes. Algoritmi analizē malas, lai aprēķinātu dimensijas. Globāls CCD izslēgums (viensaimniecības pikseļu uztvere) rada vibrācijas izraisītu malu neērtību (vertikāli -> slīpas līnijas), bet algoritmi risina malas un izbeidz kļūdas.
3.2 Optiskā diametra mērījuma piezīmes
Nav fokusa, bet ir būtisks: Kabeļu ekscentricitātes mērīšanai ir nepieciešama reāllaika optiskā uzņemšana četrām izolācijas slāņa virsotņu pozīcijām (ne tikai dimensijām). Motoru skenēšanas lazermetodes riskē ar asinhronā mērījuma kļūdām. Tātad, optiskā un elektromagnētiskā mērījuma sinhronizācija ir kritiska ierīču izstrādei.
4 Secinājumi
Elektromagnētiskā indukcija balstīta ierīce ātri mēra vadijuma elektriskā centra, ar zemām izmaksām un priekšrocībām. Risinot importēto produktu elektromagnētiskā mērījuma trūkumus, tika izstrādāts jauns fotoelektromagnētisks kabeļu ekscentrimetrs (tūkstošdaļu precizitāte). Tehnoloģijas evolūcija - nākotnes materiālu progresi ļaus sasniegt augstāku precizitāti, veicinot nozares progresu.










