การพัฒนาในการวัดความเบี่ยงเบนของสายเคเบิลโดยใช้หลักการเหนี่ยวนำแม่เหล็กไฟฟ้า: ลดการสั่นไหวและเพิ่มความแม่นยำ

ปัญหาหลักในการวัดความเบี่ยงเบนของสายเคเบิลออนไลน์คือการเคลื่อนที่ด้วยความเร็วสูงของสายเคเบิล ซึ่งต้องใช้อุปกรณ์วัดแบบไม่สัมผัสที่สามารถจัดการกับการสั่นสะเทือนของสายเคเบิลได้ เครื่องวัดความเบี่ยงเบนของสายเคเบิลด้วยรังสีเอกซ์ ที่พื้นฐานบนการถ่ายภาพด้วยการส่งผ่านแสง วัดขนาดขอบเขตหลายชั้นเพื่อคำนวณศูนย์กลางทางเรขาคณิตของตัวนำเมื่อเทียบกับความเบี่ยงเบนของฉนวน อย่างไรก็ตาม มีข้อเสียคือ ความเร็วในการวัดช้า (เพียงไม่กี่ครั้งต่อวินาที) ความคลาดเคลื่อนเพิ่มขึ้นจากแรงสั่นสะเทือนของสายเคเบิล และค่าใช้จ่ายสูง
1 หลักการของเครื่องวัดความเบี่ยงเบนของสายเคเบิลด้วยการเหนี่ยวนำแม่เหล็กไฟฟ้า
เครื่องวัดความเบี่ยงเบนของสายเคเบิลด้วยการเหนี่ยวนำแม่เหล็กไฟฟ้ารวมการวัดเส้นผ่านศูนย์กลางด้วยแสงและ การตรวจจับตัวนำด้วยการเหนี่ยวนำแม่เหล็กไฟฟ้า พวกมันวัดศูนย์กลางทางไฟฟ้าของตัวนำ (เหนือกว่าความเบี่ยงเบนทางเรขาคณิต) ด้วยความเร็วสูงหลายพันครั้งต่อวินาที ความเร็วในการวัดที่สูงขึ้นทำให้ลดผลกระทบจากการสั่นสะเทือน แทนที่อุปกรณ์รังสีเอกซ์ในสถานการณ์ที่ไม่ต้องการขนาดหลายชั้น
ผลิตภัณฑ์ที่นำเข้ามาในปัจจุบัน (ตามหลักการสาธารณะ) ใช้ขดลวดเหนี่ยวนำ 4 ตัวเพื่อตรวจจับสนามแม่เหล็ก (ดังแสดงในรูปที่ 1) บางอันกำหนดศูนย์กลางตัวนำโดยใช้ความแรงของสัญญาณเท่ากัน (ปรับหน้าต่างด้วยมอเตอร์หากไม่เท่ากัน) อีกบางอันคำนวณศูนย์กลางตัวนำจากความแรงของสัญญาณที่ตรวจจับได้

2 การควบคุมความแม่นยำในการวัด
การปรับแต่งด้วยมอเตอร์มีกระบวนการ ทำให้เกิดความล่าช้าอย่างหลีกเลี่ยงไม่ได้ ซึ่งนำไปสู่ความไม่ตรงกันระหว่างการวัดฉนวนและตัวนำ สร้างความคลาดเคลื่อนจากการล่าช้า แรงสั่นสะเทือนของสายเคเบิลมากขึ้น ความคลาดเคลื่อนก็จะใหญ่ขึ้น ในทางปฏิบัติ ข้อบกพร่องนี้ปรากฏออกมา: หากเกิดแรงสั่นสะเทือนของสายเคเบิล ผลการวัดความเบี่ยงเบนจะไม่เสถียร มีการเปลี่ยนแปลงเกิน 1% นี่สะท้อนถึงความคลาดเคลื่อนในการวัดของอุปกรณ์ ไม่ใช่สภาพจริงของสายเคเบิล
อย่างไรก็ตาม การตัดสินใจศูนย์กลางตัวนำโดยใช้ความแรงของสัญญาณเท่ากันไม่เสมอไปที่จะถูกต้อง กฎของ Biot-Savart ระบุว่า: ความเข้มของสนามแม่เหล็ก (B) ที่กระตุ้นโดยองค์ประกอบกระแส Idl ที่จุดใดๆ ในอวกาศที่ระยะห่าง r คือ:

สูตรนี้บ่งบอกว่า ความเข้มของสนามแม่เหล็กแปรผกผันกับกำลังสองของระยะห่างและแปรผันตรงกับไซน์ของมุมทิศทาง θ ดังแสดงในรูปที่ 2.

ตามนี้ การจำลองการคำนวณความสัมพันธ์ระหว่างความเข้มของสนามแม่เหล็กที่ 4 จุดในอวกาศได้ดำเนินการ สำหรับความสะดวก โมเดลเช่นในรูปที่ 3 ได้ถูกสร้างขึ้น

จุด 1, 2, 3, และ 4 กระจายอย่างเป็นออร์โธโกนอลและสมมาตร โดยมี O เป็นจุดศูนย์กลาง ให้องค์ประกอบกระแสเคลื่อนที่ตามเส้นตรง OP ของแกน 2 และ 3 ตามสูตร (1) เมื่อองค์ประกอบกระแสอยู่ที่จุดใดๆ บน OP, B1 = B4 และ B2 = B3 ดังนั้น ต้องตรวจสอบเฉพาะการเปลี่ยนแปลงของ B1/B2 กับ ∠θ หลังจากคำนวณ ได้ชุดข้อมูล และสร้างกราฟแนวโน้มแบบกระจาย ดังแสดงในตาราง 1 และรูปที่ 4

จากรูปที่ 4 แนวโน้มเป็นเส้นโค้งที่ไม่สม่ำเสมอ เมื่อ ∠θ เพิ่มขึ้น B1/B2 ลดลงจาก 1 ถึงประมาณ 0.268 (ต่ำสุด) แล้วเพิ่มขึ้นกลับมาที่ 1 ขณะที่สนามแม่เหล็กที่ 4 จุดเท่ากัน องค์ประกอบกระแสอยู่ห่างจากจุดศูนย์กลาง O ภายในช่วงนี้ ค่าแต่ละค่า (ยกเว้นต่ำสุด) มี 2 จุด ใกล้ต่ำสุด จุดจะใกล้กันมากขึ้น
นี่ใช้ได้กับควอดแรนต์หนึ่ง และเช่นเดียวกันสำหรับควอดแรนต์อื่นๆ ขึ้นอยู่กับความเข้มของสนามแม่เหล็กที่ 4 จุด ไม่สามารถตัดสินใจศูนย์กลางตัวนำหรือกำหนดศูนย์กลาง (สนามแม่เหล็กเป็นเวกเตอร์ ไม่ใช่สเกลาร์)
ดังนั้น เพื่อพัฒนาเครื่องวัดความเบี่ยงเบนที่ดีขึ้น ควรหลีกเลี่ยงการปฏิบัติตามบริษัทต่างประเทศอย่างตาบอด หลักการใหม่: วัดมุมทิศทางของสนามแม่เหล็ก θ₁, θ₂ ที่ P₁/P₂ เพื่อกำหนดศูนย์กลางแหล่ง (ดังแสดงในรูปที่ 5)

หลักการนี้สามารถสรุปทางเรขาคณิตได้ว่า: สามเหลี่ยมถูกกำหนดโดยด้านหนึ่งและมุมที่ประชิดสองมุม ขณะที่นี้เป็นจริง การนำไปใช้จริงต้องการการวัดสนามแม่เหล็กที่อ่อนแอและมีความเร็วสูงและความแม่นยำสูง
ตัวนำของสายเคเบิลกระตุ้นกระแสประมาณ 10mA ในสนามสลับภายนอก เซ็นเซอร์ ซึ่งอยู่ห่างจากสายเคเบิล ตรวจจับสนามแม่เหล็กที่อ่อนแอ (~หลักสิบ nT) ซึ่งต้องการความไวสูง ความตอบสนองความถี่สูง และเสียงรบกวนต่ำ (เสียงรบกวนธรรมชาติส่งผลต่อความแม่นยำ)
3 การดำเนินการของเครื่องวัดความเบี่ยงเบนด้วยการเหนี่ยวนำแม่เหล็กไฟฟ้า
ผลิตภัณฑ์ที่นำเข้าส่วนใหญ่ใช้เซ็นเซอร์ขดลวด บทความนี้เลือกเซ็นเซอร์แม่เหล็กไฟฟ้า ขนาดเล็กของเซ็นเซอร์รวมการวัดแม่เหล็กไฟฟ้าและแสงบนภาคตัดเดียวกัน (ลดความคลาดเคลื่อน) ด้วยความคงที่ระหว่างเซ็นเซอร์สูง เซ็นเซอร์แม่เหล็กไฟฟ้าที่สร้างด้วยวิธี photolithography เป็นทางเลือกที่เหมาะสม ในทางตรงกันข้าม ผลิตภัณฑ์ที่นำเข้าที่ใช้เซ็นเซอร์ขดลวดแยกการวัด ถือว่าส่วนตัวนำที่ไม่ใช่แสงเหมือนกัน ทำให้ความคลาดเคลื่อนเพิ่มขึ้น
การวัดด้วยเซ็นเซอร์แม่เหล็กไฟฟ้า: วัด 1000 ครั้ง/วินาที ความซ้ำซ้อน ±2% (100-200nT) ±0.2% สำหรับการวัดเฉลี่ย 1000 ครั้ง ความเชิงเส้น <0.5% การเปรียบเทียบกับการนำเข้าจำกัด (ไม่มีข้อมูล)
การรวมกับการวัดแสง LED×CCD ที่รวดเร็ว ทำให้สามารถวัดความเบี่ยงเบนแบบเรียลไทม์ (ดังแสดงในรูปที่ 6)
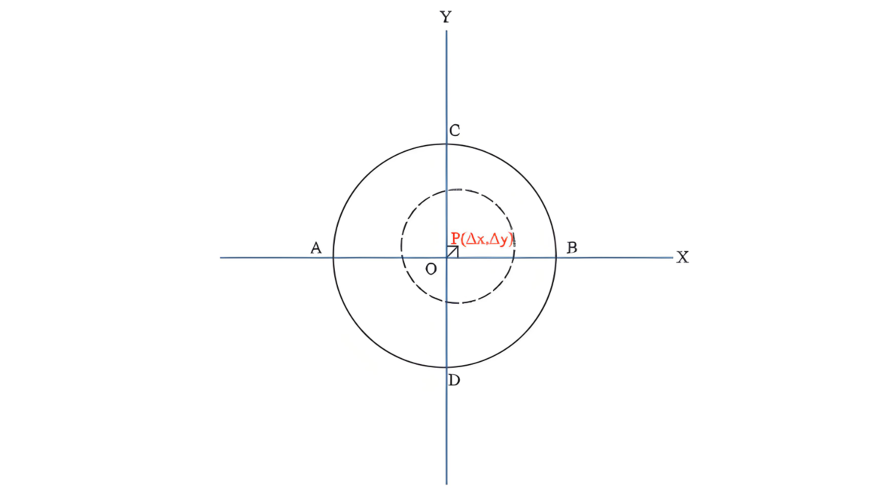
ในการวัดแต่ละครั้ง ตำแหน่งของจุด 4 จุด (A, B, C, D) บนชั้นฉนวนและตำแหน่งของจุดศูนย์กลางตัวนำ P ได้รับอย่างพร้อมกัน ความเบี่ยงเบนในทิศทาง X และ Y และความเบี่ยงเบนรวมคำนวณโดยใช้สูตรต่อไปนี้:
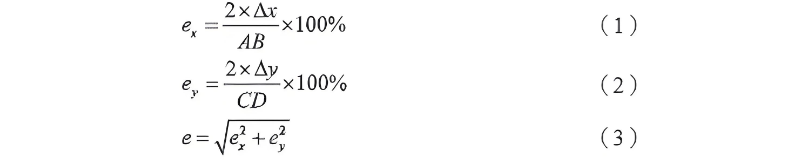
สำหรับการวัดแต่ละครั้ง ex, ey, และ e ถูกเฉลี่ย (จากจำนวนตัวอย่างที่กำหนด) เป็นผลความเบี่ยงเบนสุดท้าย เพื่อแสดงความร่วมศูนย์ ใช้ Concentricity = 1 - Eccentricity. Δx/Δy (การเบี่ยงเบนในทิศทาง X/Y) ช่วยให้ปรับหัว Extruder แบบเรียลไทม์เพื่อแก้ไขความเบี่ยงเบนของสายเคเบิลแบบอัตโนมัติ
ความเร็วในการวัดที่สูงขึ้นลดความคลาดเคลื่อนจากการสั่นสะเทือน: 1000 ครั้ง/วินาที สามารถบรรลุความแม่นยำระดับพันทวี ผลิตภัณฑ์ที่นำเข้าส่วนใหญ่ (หลายร้อยครั้ง/วินาที) กล่าวถึงความแม่นยำของความเบี่ยงเบนโดยสมมติว่าตัวนำอยู่ตรงกลาง (ตรงกับความแม่นยำของเส้นผ่านศูนย์กลางภายนอก กำหนดเป็น ±μm ค่าสัมบูรณ์ ไม่ใช่เปอร์เซ็นต์ ไม่สอดคล้อง)
3.1 การวัดเส้นผ่านศูนย์กลางด้วย LED×CCD
พื้นฐานบนออปติก telecentric ใช้การบังแสงเพื่อสร้างพื้นที่ CCD ที่สว่างและมืด อัลกอริทึมวิเคราะห์ขอบเพื่อคำนวณขนาด การสัมผัสพิกเซลของ CCD ทั่วโลก (พร้อมกัน) ทำให้ขอบเบลอเนื่องจากแรงสั่นสะเทือน (แนวตั้ง→แนวเฉียง) แต่อัลกอริทึมแก้ไขขอบและกำจัดความคลาดเคลื่อน
3.2 ข้อสังเกตการวัดเส้นผ่านศูนย์กลางด้วยแสง
ไม่ใช่จุดสนใจ แต่สำคัญ: การวัดความเบี่ยงเบนของสายเคเบิลต้องการการจับภาพแสงแบบเรียลไทม์ของตำแหน่งจุดยอด 4 จุดบนชั้นฉนวน (ไม่ใช่แค่ขนาด) วิธีการสแกนด้วยเลเซอร์โดยมอเตอร์มีความเสี่ยงต่อความคลาดเคลื่อนจากการวัดที่ไม่ตรงกัน ดังนั้น การประสานงานการวัดแสงและแม่เหล็กไฟฟ้าเป็นสิ่งสำคัญในการพัฒนาเครื่องมือ
4 สรุป
เครื่องมือที่พื้นฐานบนการเหนี่ยวนำแม่เหล็กไฟฟ้าวัดศูนย์กลางทางไฟฟ้าของตัวนำอย่างรวดเร็ว ด้วยต้นทุนต่ำและมีข้อดี แก้ไขข้อบกพร่องของการวัดแม่เหล็กไฟฟ้าของผลิตภัณฑ์ที่นำเข้า ได้พัฒนาเครื่องวัดความเบี่ยงเบนของสายเคเบิลด้วยแสงและแม่เหล็กไฟฟ้าแบบใหม่ (ความแม่นยำระดับพันทวี) เทคโนโลยีพัฒนาต่อไป การก้าวหน้าของวัสดุในอนาคตจะช่วยให้มีความแม่นยำสูงขึ้น ขับเคลื่อนความก้าวหน้าของอุตสาหกรรม
เกี่ยวกับผู้เชี่ยวชาญ
แนะนำ










