
Ett kärnutmaning i online-mätning av kabelens excentricitet är kablens höghastighetsrörelse. Detta kräver mätutrustning utan kontakt som kan hantera kabelflax. Röntgenbaserade kabelexcentriskopar, baserade på optisk transmissionbildning, mäter flerlagda konturdimensioner för att beräkna ledarens geometriska centrum relativt till isoleringsexcentricitet. De har dock nackdelar: långsam mätfart (bara några gånger per sekund), ökade fel från kabelflax och höga kostnader.
1 Princip för kabelexcentriskopar baserade på elektromagnetisk induktion
Kabelexcentriskopar baserade på elektromagnetisk induktion kombinerar optisk diametermätning och elektromagnetisk induktion för ledardetektering. De mäter ledarens elektriska centrum (överlägset geometrisk excentricitet) med en hög hastighet på tusentals mätningar per sekund. Snabbare mätning minskar effekterna av kabelflax, vilket ersätter röntgenenheter i situationer där det inte finns något behov av flerlagda dimensioner.
Några importerade produkter (enligt offentliga principer) använder fyra induktiva spolar för att detektera magnetfält (som i figur 1). Några bestämmer ledarcentrering via lika signalstyrka (justerar fönstret med motorer om det inte är lika); andra beräknar ledarcentrum från uppmätt signalstyrka.

2 Kontroll av mätprecision
Motorjustering innebär en process, vilket oundvikligen leder till försening. Detta orsakar desynkronisering mellan mätning av isolering och ledare, vilket skapar förseningsfel—mer allvarlig kabelflax ger större fel. I praktiken visar sig detta fel: om kabelflax inträffar, blir excentricitetsmätresultaten instabila, med variationer över 1 %. Detta återspeglar utrustningsmätfel, inte den faktiska kabelläget.
Men att döma ledarcentrering enbart genom lika signalstyrka är inte alltid giltigt. Biot-Savarts lag säger: magnetinduktionsintensiteten (B) uppväckt av en strömelement Idl vid någon punkt i rummet på avstånd r är:

Denna formel indikerar att magnetinduktionsintensiteten är omvänt proportionell mot kvadraten av avståndet och proportionell mot sinus av riktningsvinkeln θ, som visas i figur 2.

Baserat på detta utförs en simulering av sambandet mellan magnetfältsintensiteterna vid fyra punkter i rummet. För bekvämlighet etableras en modell som visas i figur 3.

Punkterna 1, 2, 3 och 4 är ortogonalt och symmetriskt fördelade, med O som mittpunkt. Låt strömelementet röra sig längs medlinjen OP av axlarna 2 och 3. Enligt Formel (1), när strömelementet är vid någon punkt på OP, gäller B1 = B4 och B2 = B3. Således behöver endast variationen av B1/B2 med ∠θ undersökas. Efter beräkning erhålls ett dataset, och en spridningstrendgraf genereras, som visas i tabell 1 och figur 4.

Som syns i figur 4, är trenden en oregelbunden kurva. När ∠θ ökar, sjunker B1/B2 från 1 till ~0,268 (min), sedan stiger tillbaka till 1. Medan magnetfält vid fyra punkter jämnas ut, är strömelementet långt ifrån mittpunkt O. Under intervallet har varje värde (förutom min) två punkter—närmare min, punkter är närmare.
Detta gäller för en kvadrant, och samma gäller för de andra. Att lita på magnituden av fyra-punktsmagnetfält kan inte bedöma ledarcentrering eller fastställa dess centrum (magnetfält är en vektor, inte en skalär).
Således, för att utveckla en bättre excentriskop, undvik blindt följa utländska företag. En ny princip: mät riktningarna θ₁, θ₂ vid P₁/P₂ för att fastställa källcentrum O (figur 5).

Denna princip sammanfattas geometriskt som: En triangel är unikt bestämd av en sida och två intilliggande inkluderade vinklar. Medan detta gäller, krävs praktisk implementering av snabb, högprecision mätning av svaga magnetfält.
Kabelledare inducerar ~10mA ström i externa växelströmsfält. Sensorer, placerade från kablar, detekterar svaga (~tiotal nT) fält—kräver hög känslighet, frekvensrespons och låg brus (inbyggd brus påverkar precision).
3 Implementering av kabelexcentriskopar baserade på elektromagnetisk induktion
De flesta importerade produkter använder spalsensorer; denna artikel väljer magnetoresistiva sensorer. Små sensorer integrerar elektromagnetiska/optiska mätningar på samma tvärsnitt (minimerar fel), med hög enhetlighet mellan sensorer. Lithografi-baserade magnetoresistiva sensorer är idealiska. I kontrast, importerade spalsensorprodukter separerar mätningar, behandlar icke-optiska ledarsegment som identiska—ökade fel.
Magnetoresistiv-baserade mätningar: 1000/s mätningar, ±2% repetitivitet (100–200nT), ±0,2% för 1000-mätningssnitt, linjäritet <0,5%. Jämförelser med import är begränsade (ingen data).
Kombination med snabb LED×CCD optisk mätning möjliggör realtids-excentricitetsmätning (figur 6).
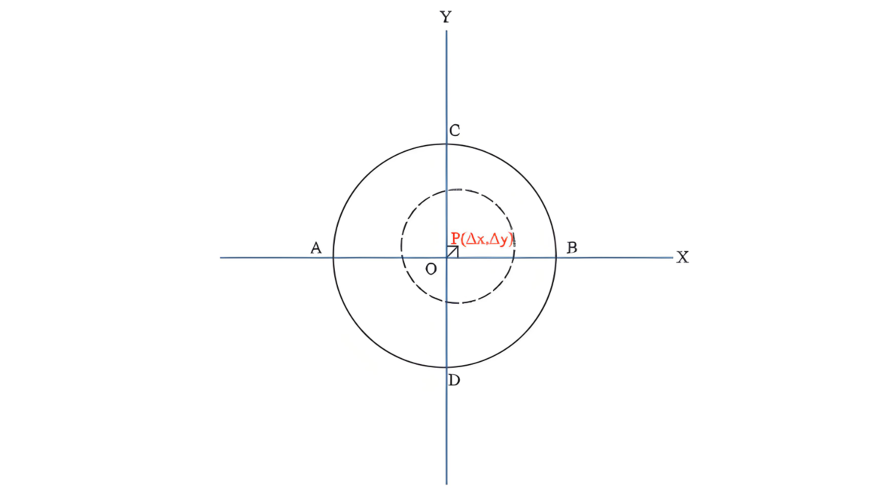
Under varje mätning erhålls positionerna för fyra punkter (A, B, C, D) på isoleringslagret och positionen för ledarcentrumpunkten P samtidigt. Excentriciteten i X- och Y-led samt total excentricitet beräknas med följande formler:
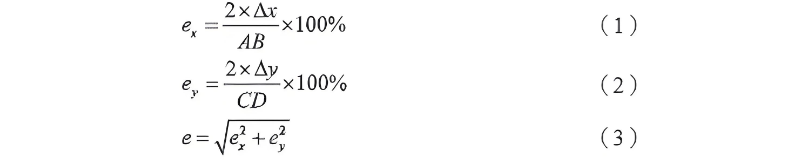
För varje mätning genomsnitts ex, ey, och e (över ett angivet antal prov) som det slutliga excentricitetsresultatet. För att visa koncentricitet, använd Koncentricitet = 1 - Excentricitet. Δx/Δy (X/Y-led avvikelser) möjliggör realtidsjustering av extruderspets för automatisk korrigering av kabelns excentricitet.
Snabbare mäthastigheter minskar flaxfel: 1000 mätningar/sekund uppnår tusendelsplatsprecision. De flesta importerade produkter (hundratals mätningar/sekund) hävdar excentricitetsprecision under antagande av centrerad ledare (matchar ytterdiameterprecision, givet som ±µm absoluta värden, inte procent—icke-kompatibelt).
3.1 LED×CCD-diametermätning
Baserat på telecentrisk optik, använder det ljusskydd för att skapa ljusa/mörka CCD-regioner. Algoritmer analyserar kanter för att beräkna dimensioner. Global CCD-exponering (samtidig pixeldetektion) orsakar kabelflaxinducerad kantförsvagning (vertikal→snedstreck), men algoritmer löser kanter och eliminerar fel.
3.2 Noter för optisk diametermätning
Inte fokuset, men nyckel: Kabelexcentricitetsmätning kräver realtids-optisk insamling av fyra isoleringslagrets hörnpunkter (inte bara dimensioner). Motor-scannade lasermetoder riskerar asynkrona mätfel. Således är synkronisering av optiska och elektromagnetiska mätningar kritisk för instrumentutveckling.
4 Slutsats
Instrumentet baserat på elektromagnetisk induktion mäter snabbt ledarens elektriska centrum, med låga kostnader och fördelar. Genom att adressera importerade produkters elektromagnetiska mätbrister, utvecklas en ny fotoelektromagnetisk kabelexcentriskop (tusendelsplatsprecision). Teknik utvecklas—framtidens materialframsteg kommer att möjliggöra högre precision, driver industriell framåtskridande.










