
Põhiline väljakutse kaabli eksentrisuse mõõtmisel on kaabli kiire liikumine. See nõuab puudutamisvaba mõõtevarustust, mis suudab kohaneda kaabli hüpplemisega. Rentgenipõhised kaabli eksentrimetriid, mis põhinevad optilisel edasikandmisele, mõõdavad mitmesihuliste kontuuride mõõtmeid, et arvutada juhtimise geomeetriline keskpunkt vastavalt eraldusmaterjali eksentrisusele. Siiski on neil puudusi: aeglane mõõtmine (ainult mõned kordi sekundis), kasvavad vead kaabli hüpplemise tõttu ja kõrge hinnaga.
1 Elektromagnetilise induktsiooni põhineva kaabli eksentrimetri printsiip
Elektromagnetilise induktsiooni põhinevad kaabli eksentrimetriid kombinivad optilist läbimõõdu mõõtmist ja elektromagnetilist induktsiooni juhtimise tuvastamiseks. Nad mõõdavad juhtimise elektrilist keskpunkti (paremini kui geomeetriline eksentrisus) kiirusel tuhandeid mõõtmisi sekundis. Kiirem mõõtmine vähendab hüpplemise mõju, asendades rentgeniseadmed olukordades, kus mitmesihuliste mõõtmiste nõuded puuduvad.
Praegu importitavad tooted (avalike printsiipide kohaselt) kasutavad nelja induktiivset kaela magneetväli tuvastamiseks (nagu näha joon. 1). Mõned määrame juhtimise keskendumise võrdse signaalitugevuse kaudu (kui see on erinev, siis seade reguleeritakse mootoriga); teised arvutavad juhtimise keskpunkti tuvastatud signaalitugevuse kaudu.

2 Mõõtmise täpsuse kontroll
Mootori reguleerimine on protsess, mis väldimatult tekitab viivitust. See viib isolatsiooni ja juhtimise mõõtmiste desünkroniseerimiseni, tekitades viivitusvead - rohkem tõsine kaabli hüpplemine tõstab veid. Praktikas avaldub see puudus järgmiselt: kui kaabli hüpplemine toimub, muutuvad eksentrisuse mõõtmise tulemused ebastabiilseteks, kummardustega, mis ületavad 1%. See näitab varustuse mõõtmisvead, mitte tegelikku kaabli seisundit.
Kuid võrdse signaalitugevuse kaudu juhtimise keskendumise hindamine ei ole alati õigustatud. Biot-Savart'i seadus ütleb: magnetinduktsiooni tugevus (B), mida sellel ajal element Idl tekitab mingis ruumi punktis kaugusel r, on:

See valem näitab, et magnetinduktsiooni tugevus on võrdeline kauguse ruudu vastandiga ja suunakulma sinusega θ, nagu näha joon. 2.

Selle alusel tehakse simulaararvutus nelja ruumi punkti magneetväliste intensiteetide suhte kohta. Lihtsuse huvides luuakse mudel, nagu näha joon. 3.

Punktid 1, 2, 3 ja 4 on ortogonaalselt ja sümmeetriselt paigutatud, O on keskpunkt. Olgu sellel ajal element liigub telgede 2 ja 3 kesklinjal OP. Valemiga (1) järgi, kui sellel ajal element on mingis punktis OP-l, kehtib B1 = B4 ja B2 = B3. Seega, tuleb ainult uurida B1/B2 muutust ∠θ suurendamisel. Arvutuse järel saadakse andmete rühm, millest genereeritakse scatter trend graafik, nagu näha tabelis 1 ja joon. 4.

Joon. 4 näitab, et trend on eeregulaarne kurv. Kui ∠θ suureneb, laskub B1/B2 1-st umbes 0.268-ni (min), siis tõuseb tagasi 1-ni. Kui neli punkti magneetväljad võrdnevad, on sellel ajal element kaugel keskpunktist O. Selle perioodi jooksul iga väärtus (välja arvatud min) omab kaks punkti - lähedamini miinimumile, punktid on lähemal.
See kehtib ühe kvadrandi korral, samuti kehtib sama muudes. Nelja punkti magneetväliste intensiteetide põhjal ei saa hinnata juhtimise keskendumist ega määrata selle keskpunkti (magneetväli on vektor, mitte skalaar).
Seega, parema eksentrimetri arendamiseks tuleb vältida soovituste järgimist välisfirmade poolt. Uus printsiip: mõõda magneetväli suunakulmi θ₁, θ₂ punktides P₁/P₂, et määrata allika keskpunkt O (joon. 5).

See printsiip on geomeetriliselt kokkuvõtetena: kolmnurk on unikaalne, kui määratakse üks külg ja kaks naaberlikku sisemist nurka. Kui see kehtib, praktiline rakendamine nõuab kiiret ja täpset nõrga magneetväli mõõtmist.
Kaablite juhtimised tekitavad ligikaudu 10mA voolu välises vaihevoolu väljas. Sensorid, mis on kaugel kaablidest, tuvastavad nõrgad magneetväljad (~dutzend nT) - nõudes suurt tundlikkust, sagedusvastust ja madalat müra (inherentne müra mõjutab täpsust).
3 Elektromagnetilise induktsiooni põhineva eksentrimetri rakendamine
Enamus importitavaid tooteid kasutab kaelaseadmeid; see artikkel valib magnetoresistentseid sensorid. Väikesed sensorid integreerivad elektromagnetilise ja optilise mõõtmise sama ristlõigus (vähendades veid), suurel konsistentsiga sensooride vahel. Litograafia põhinevad magnetoresistentseid sensorid on ideaalsed. Vastupidiselt, importitud kaelaseadmeid jagavad mõõtmisi, käsitlevad mitte-optilisi juhtimissegmente identseina - suurendades veid.
Magnetoresistentseid mõõtmisi: 1000/s mõõtmisi, ±2% repeatabelsus (100–200nT), ±0.2% 1000-mõõtmise keskmise puhul, lineaarsus <0.5%. Võrdlused importiga on piiratud (andmed puuduvad).
Kiire LED×CCD optilise mõõtmise kombinatsioon võimaldab reaalajas eksentrisuse mõõtmist (joon. 6).
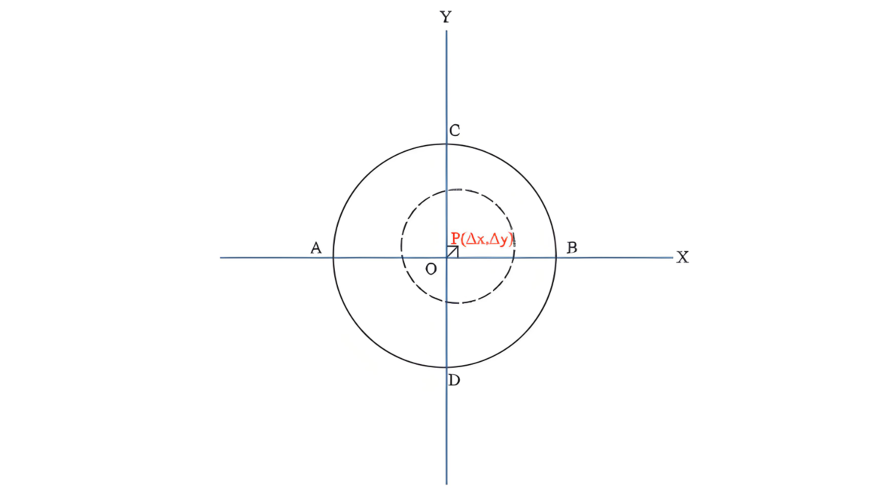
Iga mõõtmisel saadetakse sünonoomiliselt nelja punkti (A, B, C, D) asukoht eraldusmaterjali kihtis ja juhtimise keskpunkti P asukoht. X- ja Y-suunalised eksentrsused ja üldine eksentrsus arvutatakse järgmistel valemitel:
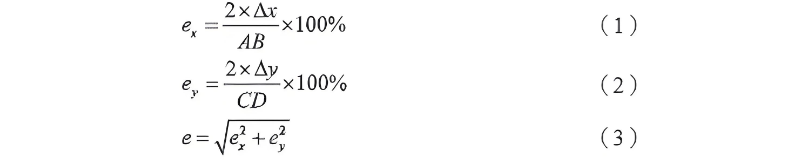
Iga mõõtmisel keskmistatakse ex, ey ja e (üle kindla proovide arvu) kui lõplik eksentrsuse tulemus. Keskendumise näitamiseks kasutatakse Keskendumine = 1 - Eksentrsus. Δx/Δy (X/Y-suunalised hälbed) võimaldavad reaalajas ekstrudoori pea korrigeerimist automaatseks kaabli eksentrsuse parandamiseks.
Kiiremad mõõtmiskiirused vähendavad hüpplemisveid: 1000 mõõtmist sekundis saavutavad tuhandiku täpsust. Enamus importitavaid tooteid (sadu mõõtmisi sekundis) väidab eksentrsuse täpsust, eeldades keskeles olevat juhtimist (vastavalt välisdiameetri täpsusele, antud absoluutväärtustena ±μm, mitte protsentides - mitte vastav).
3.1 LED×CCD läbimõõdu mõõtmine
Telecentrilise optika põhjal kasutab seda valguse blokeerimist, et luua CCD-reaalühikuid. Algoritmid analüüsivad servasid, et arvutada mõõtmeid. Üldine CCD-valgustus (samal ajal pikslite tuvastamine) tekitab hüpplemise tõttu servade sumbumise (vertikaalselt - kaldunurgi), kuid algoritmid lahendavad servasid ja elimineerivad veid.
3.2 Optilise läbimõõdu mõõtmise märkmed
Ei ole fookuses, kuid oluline: Kaabli eksentrisuse mõõtmiseks on vaja reaalajas optilist kaaplemist neli eraldusmaterjali kihi tipu asukoha (mitte ainult mõõtmeid). Mootoriga skaneeritud lazermeetodid riskivad asünkroonne mõõtmisveadega. Seega, on kriitiliselt oluline, et optilised ja elektromagnetilised mõõtmised oleksid sünkroonis.
4 Järeldus
Elektromagnetilise induktsiooni põhine seade mõõdab kiiresti juhtimise elektrilist keskpunkti, madalate kulude ja eeliste kaudu. Lahendades importitavate toodete elektromagnetiliste mõõtmiste puudusi, on arendatud uus fotoelektromagnetiline kaabli eksentrisuse meetrite (tuhandiku täpsusega). Tehnoloogia arenedes tulevaste materjalide edusammud võimaldavad suuremat täpsust, edendades tööstusharu edasiminekut.Tehnoloogia areng - tulevaste materjalide edusammud võimaldavad suuremat täpsust, edendades tööstusharu edasiminekut.










