
Ena eldaŭega problemo en la mezurado de kablo-ekcentroco ene de la reto estas la rapida moviĝo de la kablo. Tio postulas kontakton-senchan mezuran aparaton, kiu povas pritrakti vibradon de la kablo. Rentegeblaj kablekcentrometroj bazitaj sur optika transmisiomagado mezuras multoblajn strato-konturojn por kalkuli la geometrian centron de konduktoroj relativ al izolanta ekcentroco. Tamen ili havas malavantaĝojn: malrapida mezura rapido (nur kelkfoje sekunde), pligrandigita eraro pro kabl-vibrado, kaj alta kostoj.
1 Principo de Elektromagnet-indukcia Bazitaj Kablekcentrometroj
Elektromagnet-indukcia bazitaj kablekcentrometroj kombinas optikan diametran mezuron kaj elektromagnetan indukcion por detektado de konduktoro. Ili mezuras la elektran centron de la konduktoro (superiora al geometria ekcentroco), kun alta rapideco de miloj da mezuroj sekunde. Pli rapida mezuro reduktas efektojn de vibrado, anstataŭigante rentegeblajn aparatojn en situacioj sen bezono pri multoblaj strato-dimensioj.
Aktualaj importitaj produktoj (laŭ publikaj principoj) uzas kvar induktivajn spiralojn por detekti magnetajn kampojn (kiel en Figuro 1). Iuj determinas la centrigon de la konduktoro per egala signalforto (ŝanĝante la fenestron per motoroj se neegala); aliaj kalkulas la centron de la konduktoro el detektita signalforto.

2 Kontrolo de Mezura Precizeco
La regado per motoro implicas procezon, neeviteble kaŭzante malfruon. Tio kondukas al desinkronigo inter la mezuroj de la izolanto kaj la konduktoro, kreante eraron pro malfruo—pli severa vibrado de la kablo rezultigas pli grandajn erarojn. En praktiko, ĉi tiu manko montriĝas: se okazas vibrado de la kablo, la rezultoj de la ekcentroca mezuro iĝas instabilaj, kun fluktuoj super 1%. Tio reflektas eraron de la aparato, ne la realan kondiĉon de la kablo.
Tamen, judiki la centrigon de la konduktoro per egala signalforto ne estas ĉiam valida. La leĝo de Biot-Savart diras: la magneta indikcintenseco (B) ekscitita de akta elemento Idl je ajna punkto en spaco je distanco r estas:

Ĉi tiu formulo indikas, ke la magneta indikcintenseco estas inverse proporcia al la kvadrato de la distanco kaj proporcia al la sinuso de la direkta angulo θ, kiel montrite en Figuro 2.

Surbaze de tio, estas farita simulacia kalkulado de la rilato inter la magnetoinduko en kvar punktoj en spaco. Por komodo, estas konstruita modelo kiel montrite en Figuro 3.

Punktoj 1, 2, 3, kaj 4 estas ortogonalaj kaj simetriaj distribuitaj, kun O kiel la centro. Lasu la aktan elementon moviĝi laŭ la meza linio OP de aksoj 2 kaj 3. Laŭ Formulo (1), kiam la aktan elemento estas je ajna punkto sur OP, validas B1 = B4 kaj B2 = B3. Do, nur necesas esplori la ŝanĝon de B1/B2 kun ∠θ. Post kalkulo, estas akiritaj datumserio, kaj generita disprezent-grafo, kiel montrite en Tablo 1 kaj Figuro 4.

Kiel vidite en Figuro 4, la tendenco estas neordinara kurbo. Kiam ∠θ pligrandiĝas, B1/B2 malkreskas de 1 ĝis ~0.268 (minimumo), poste ree kreskas al 1. Dum la magnetaj kampoj en kvar punktoj egalas, la aktan elemento estas for de la centro O. En la intervalo, ĉiu valoro (escepte minimumo) havas du punktojn—pli proksima al minimumo, punktoj estas pli proksimaj.
Ĉi tio aplikas al unu kvadranto, kaj la sama validas por aliaj. Reliĝi al la magnetoinduko en kvar punktoj ne eblas juĝi la centrigon de la konduktoro aŭ determini ĝian centron (magneta kampo estas vektoro, ne skalaro).
Do, por evoluigi pli bonan ekcentrometron, evitu blinda sekvi fremdajn firmojn. Nova principo: mezuru la direkta angulojn θ₁, θ₂ je P₁/P₂ por determini la font-centron O (Figuro 5).

Ĉi tiu principo geometrie resumas kiel: triangulo estas unike difinita per unu flanko kaj du apudaj inkluzivaj anguloj. Dum ĉi tio validas, praktika realigo postulas rapidan, altan precizan mezuron de malfortaj magnetaj kampoj.
Konduktoroj de kablo induktas ~10mA kurenton en eksteraj alternantaj kampoj. Sensiloj, spacigitaj de kabloj, detektas malfortajn (~dekdozenaj nT) kampojn—postulante altan sentempecon, frekvencan respondon, kaj malaltan bruon (inherenta bruado influas precizecon).
3 Realigo de Elektromagnet-indukcia Bazitaj Ekcentrometroj
Pluraj importitaj produktoj uzas spiralsensilojn; ĉi tiu artikolo elektas magnetrezistancajn sensilojn. Malgrandaj sensiloj integras elektromagnetajn kaj optikajn mezurojn sur la sama tranĉo (minimigante erarojn), kun alta inter-sensila konsekvenco. Fotografie bazitaj magnetrezistancaj sensiloj estas ideala. Kontraste, importitaj spiralsensilaj produktoj apartigas mezurojn, traktante ne-optikajn segmentojn de konduktoroj kiel identajn—pligrandigante erarojn.
Magnetrezistanc-bazitaj mezuroj: 1000/s mezuroj, ±2% ripetebleco (100–200nT), ±0.2% por 1000-mezuraj mezumoj, linearuseco <0.5%. Komparoj kun importoj estas limigitaj (neniu datumo).
Kombini kun rapida LED×CCD optika mezuro ebligas realtempan ekcentroman mezuron (Figuro 6).
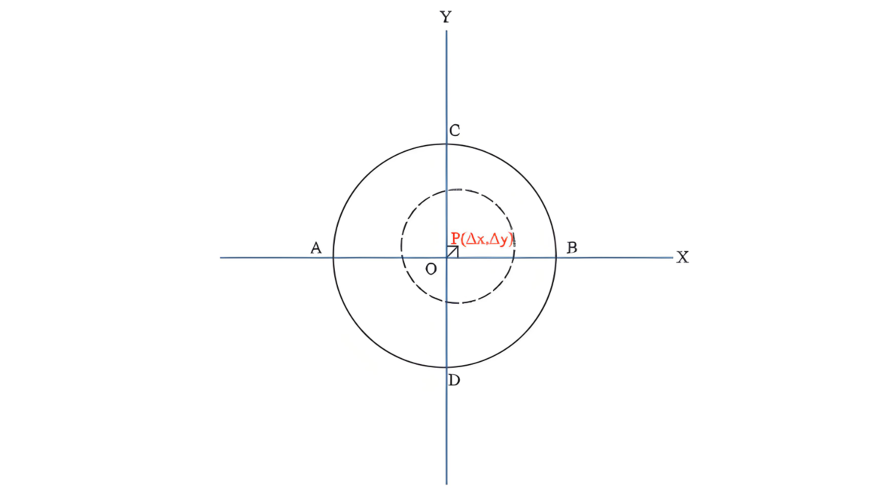
Je ĉiu mezuro, la pozicioj de kvar punktoj (A, B, C, D) sur la izolada strato kaj la pozicio de la konduktora centro P estas sinkrone akiritaj. La ekcentroco en la X kaj Y direktoj kaj la totala ekcentroco estas kalkulitaj per jenaj formuloj:
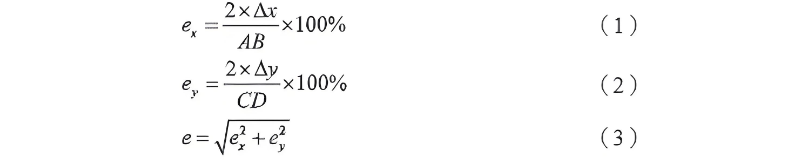
Por ĉiu mezuro, ex, ey, kaj e estas mezumitaj (sur certa nombro da provantaroj) kiel la fina ekcentroca rezulto. Por montri koncentricecon, uzu Koncentricecon = 1 - Ekcentroco. Δx/Δy (devioj en X/Y direktoj) ebligas realtempan adaptigon de la ekstrudilo por aŭtomata korektado de kablekcentroco.
Pli rapida mezura rapido reduktas erarojn pro vibrado: 1000 mezuroj/sekundo atingas milionan lokprecizecon. Plej multaj importitaj produktoj (centoj da mezuroj/sekundo) asertas ekcentrocan precizecon supozante centritan konduktoron (kongrua kun ekstera diametra precizeco, donita kiel ±μm absolutvaloro, ne procento—nekonforma).
3.1 LED×CCD Diametra Mezuro
Bazita sur telecentra optiko, ĝi uzas lumoblokadon por krei klara-obskurajn CCD-regionojn. Algoritmoj analizas randojn por kalkuli dimensiojn. Globala CCD-espozo (samtempa piksel-sentemo) kaŭzas randa blurado pro vibrado (vertikale → oblique linioj), sed algoritmoj solvas randojn kaj eliminas erarojn.
3.2 Notoj pri Optika Diametra Mezuro
Ne la fokuso, sed klavega: Kablekcentroca mezuro postulas realtempan optikan akiradon de la pozicioj de kvar verticoj de la izolada strato (ne nur dimensioj). Motor-skaniĝa lasebla metodo riskas asinkronan mezuran eraron. Do, sinkronigo de optikaj kaj elektromagnetaj mezuroj estas kritika por instrumenta evoluigo.
4 Konkludo
La elektromagnet-indukcia bazita aparato rapide mezuras la elektran centron de la konduktoro, kun malalta kostoj kaj avantaĝoj. Solvante defektojn de importitaj produktaj elektromagnetaj mezuroj, nova fotoelektromagnet-a kablekcentrometro estas evoluigita (milionan lokprecizecon). Teknologio evoluos—futuraj materialaj progresoj ebligos pli altan precizecon, promovante industrian progreson.










