
'n Kern-uitdaging in die onlinemaatstaf van kabelsentrisiteit is die hoëspoedbeweging van die kabel. Dit vereis nie-kontakmaatstoestelle wat met kabeltrilling kan omgaan. Röntgenkabelsentrisiteitsmeter, gebaseer op optiese transmissiebeelde, meet multi-laagkontourafmetings om die geometriese middelpunt van geleiders relatief tot isolasiesentrisiteit te bereken. Dit het egter nadele: langsame maatsnelheid (slegs 'n paar keer per sekonde), verhoogde foute as gevolg van kabeltrilling, en hoë koste.
1 Prinsip van Elektromagnetiese Induksie-gebaseerde Kabelsentrisiteitsmeters
Elektromagnetiese induksie-gebaseerde kabelsentrisiteitsmeters kombinereer optiese diametermaat en elektromagnetiese induksie vir geleiderbespeuring. Hulle meet die elektriese middelpunt van die geleider (superieur aan geometriese sentrisiteit), met 'n hoë spoed van duisende maatstawwe per sekonde. Vinniger maatstaf verminder trillingsimpakte, en vervang röntgentoestelle in situasies sonder multi-laagafmetingsvereistes.
Tans gebruikte ingevoerde produkte (volgens bekende prinsipes) vier induktiewe spoels om magneetvelde te bespeur (soos in Figuur 1). Sommige bepaal geleidermiddeling deur gelyke seinsterkte (aanpas die venster met motore indien ongelyk); ander bereken die geleidermiddelpunt uit die bespeurde seinsterkte.

2 Maatstafakkuraatheidbeheer
Motoraanpassing behels 'n proses, wat onvermydelik lei tot 'n vertragting. Dit lei tot desynchronisasie tussen isolasie- en geleidermaatstawwe, wat vertragtingsfoute skep—meer ernstige kabeltrilling veroorsaak groter foute. In die praktyk manifesteer hierdie fout: as kabeltrilling voorkom, word sentrisiteitsmaatresultate onstabiel, met fluktuasies wat 1% oorskry. Dit weerspieël toestelmaatfout, nie die werklike kabelaftand nie.
Maar, om geleidermiddeling deur gelyke seinsterkte te bepaal, is nie altyd geldig nie. Biot-Savart se Wet stel: die magneetiese induksiesterkte (B) opgewek deur 'n stroomelement Idl by enige punt in die ruimte teen 'n afstand r is:

Hierdie formule wys dat die magneetiese induksiesterkte omgekeerd eweredig is aan die kwadraat van die afstand en eweredig aan die sinus van die rigtingshoek θ, soos getoon in Figuur 2.

Gebaseer op dit, word 'n simulasieberekening van die verhouding tussen die magneetveldesterktes by vier punte in die ruimte gedoen. Vir gemak word 'n model soos in Figuur 3 opgestel.

Punte 1, 2, 3, en 4 is ortogonaal en simmetries verdeel, met O as die middelpunt. Laat die stroomelement langs die middellyn OP van asse 2 en 3 beweeg. Volgens Formule (1), wanneer die stroomelement by enige punt op OP is, geld B1 = B4 en B2 = B3. Dus, slegs die variasie van B1/B2 met ∠θ moet ondersoek word. Na berekening word 'n stel data verkry, en 'n strooiingstrendgrafiek gegenereer, soos in Tabel 1 en Figuur 4 getoon.

Soos in Figuur 4 gesien, is die trend 'n onreëlmatige kromme. As ∠&θ toenem, daal B1/B2 van 1 na ~0.268 (min), dan styg dit terug na 1. Terwyl die magneetvelde by vier punte gelyk word, is die stroomelement ver van middelpunt O. In die interval het elke waarde (behalwe min) twee punte—na min toe, is die punte nader.
Dit is van toepassing op een kwadrant, en dieselfde geld vir ander. Die vertroue op vier-puntmagneetveldmagnitude kan nie geleidermiddeling bepaal of sy middelpunt vind nie (magneetveld is 'n vektor, nie 'n skalaar nie).
Dus, om 'n beter sentrisiteitsmeter te ontwikkel, moet jy nie blinde volg buitelandse maatskappye nie. 'n Nuwe prinsip: meet magneetveldrigtingshoeke θ₁, &θ₂ by P₁/P₂ om bronmiddelpunt O te bepaal (Figuur 5).

Hierdie prinsip word geometriese opgesom as: 'n Driehoek word uniek bepaal deur een sy en twee agterliggende insluitende hoeke. Terwyl dit geld, vereis praktiese implementering hoëspoed, hoëakkuraatheidmaat van swak magneetvelde.
Kabelgeleiders veroorsaak ~10mA stroom in buitewisselende velde. Sensore, geskei van kabelle, bespeur swak (~tientalle van nT) velde—wat hoë sensitiviteit, frekwensie-antwoord, en lae geraas (inherente geraas beïnvloed akkuraatheid) vereis.
3 Implementering van Elektromagnetiese Induksie-gebaseerde Sentrisiteitsmeters
Die meeste ingevoerde produkte gebruik spoelsensore; hierdie artikel kies magnetoresistiewe sensore. Klein sensore integreer elektromagnetiese/optiese maatstawwe op dieselfde doorsnede (minimeer foute), met hoë inter-sensorkonsekwentie. Fotolitografie-gebaseerde magnetoresistiewe sensore is ideaal. Teenoorstaande, ingevoerde spoelsensorprodukte skei maatstawwe, behandel nie-optiese geleidersegmente as identies nie—verhoog foute.
Magnetoresistiewe-gebaseerde maatstawwe: 1000/s maatstawwe, ±2% herhaalbaarheid (100–200nT), ±0.2% vir 1000-maatgemiddeldes, lineariteit <0.5%. Vergelykings met invoerrelik is beperk (geen data nie).
In kombinasie met vinnige LED×CCD optiese maatstaf maak dit real-time sentrisiteitsmaatstaf moontlik (Figuur 6).
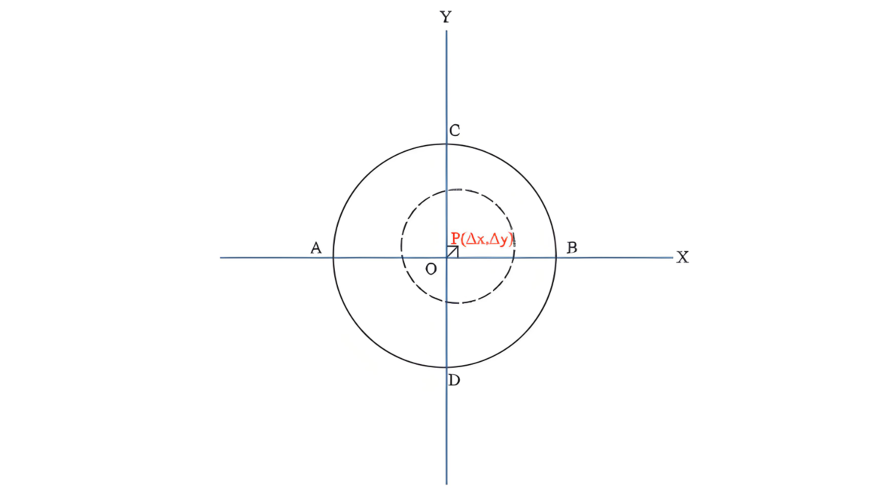
Tydens elke maatstaf word die posisies van vier punte (A, B, C, D) op die isolasie-laag en die posisie van die geleidermiddelpunt P gelyktydig verkry. Die sentrisiteits in die X- en Y-rigting en die totale sentrisiteit word bereken deur die volgende formules:
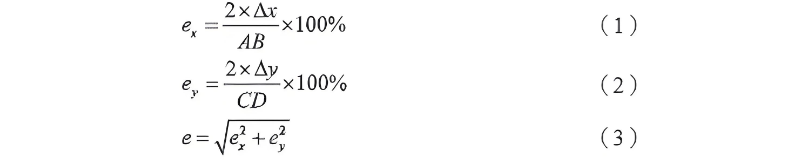
Vir elke maatstaf, word ex, ey, en e gemiddeld (oor 'n ingestelde aantal monsters) as die finale sentrisiteitsresultaat. Om koncentrisiteit te wys, gebruik Koncentrisiteit = 1 - Sentrisiteit. Δx/Δ y (X/Y-rigtingafwykings) maak real-time extruderkop-aanpassings moontlik vir outomatiese kabelsentrisiteitkorreksie.
Vinniger maatstafspoed verminder trillingsfoute: 1000 maatstawwe per sekonde bereik duisendsteplekakkuraatheid. Die meeste ingevoerde produkte (honderde maatstawwe per sekonde) beweer sentrisiteitsakkuraatheid onder die aanname van 'n gecentreerde geleider (stem ooreen met buitendiameterakkuraatheid, gegee as ±μm absolute waardes, nie persentasies nie—nie-voldoende).
3.1 LED×CCD Diametermaatstaf
Gebaseer op telezentriese optika, gebruik dit ligblokkering om helder-donker CCD-gebiede te skep. Algoritmes analiseer rande om afmetings te bereken. Globale CCD-blootstelling (simultanêse pikselwaarneming) veroorsaak trillingsinduseerde randverswemmings (vertikaal→scheef lynne), maar algoritmes los rande op en elimineer foute.
3.2 Notas oor Optiese Diametermaatstaf
Nie die fokus, maar krities: Kabelsentrisiteitsmaatstaf vereis real-time optiese vang van vier isolasie-laaghoekposisies (nie net afmetings nie). Motor-geskandeerde lasermetodes dra risiko vir asynchrone-maatstafout. Dus, is die synchronisering van optiese en elektromagnetiese maatstawwe krities vir instrumentontwikkeling.
4 Gevolgtrekking
Die elektromagnetiese induksie-gebaseerde instrument meet vinnig die elektriese middelpunt van die geleider, met lae koste en voordele. Deur die elektromagnetiese maatstafoutkomste van ingevoerde produkte aan te spreek, is 'n nuwe foto-elektromagnetiese kabelsentrisiteitsmeter ontwikkel (duisendsteplekakkuraatheid). Tegnologie evolueer—toekomstige materiaalvooruitsigte sal hoër presisie moontlik maak, wat industriële vooruitgang dreef.










