
En sentral utfordring i online-måling av kabelens eksentrisitet er kabelens høy hastighet. Dette krever ikke-kontaktmåleutstyr som kan håndtere kabelsvingninger. Røntgenbaserede kabeleksentrimetere, basert på optisk overføringsavbildning, måler flerlagets konturdimensjoner for å beregne ledernes geometriske senter relativt til isolasjonseksentrisitet. Imidlertid har de noen ulemper: lav målehastighet (bare noen få ganger per sekund), økte feil fra kabelsvingninger og høye kostnader.
1 Prinsipp for elektromagnetisk induksjonsbaserte kabeleksentrimetere
Elektromagnetisk induksjonsbaserede kabeleksentrimetere kombinerer optisk diametermåling og elektromagnetisk induksjon for ledersporing. De måler ledens elektriske senter (bedre enn geometrisk eksentrisitet), med en høy hastighet på flere tusen målinger per sekund. Høyere målhastighet reduserer svingningspåvirkningen, og erstatter røntgenenheter i scenarier uten behov for flerlagets dimensjoner.
Nåværende importerte produkter (etter offentlige prinsipper) bruker fire induktive spoler for å oppdage magnetfelt (som vist i figur 1). Noen bestemmer lederens sentrering gjennom like signalstyrker (justerer vinduet med motorer hvis ulike); andre beregner lederens senter fra det oppdagete signalstyrken.

2 Kontroll av målnøyaktighet
Motorjustering involverer en prosess, som uunngåelig fører til forsinkelse. Dette fører til asynkronisering mellom isolasjons- og ledermålinger, som skaper forsinkelsesfeil – mer alvorlige kabelsvingninger resulterer i større feil. I praksis viser denne feilen seg: hvis kabelsvingninger forekommer, blir eksenstrihetsmålingsresultatene ustabile, med fluktuasjoner som overstiger 1%. Dette reflekterer utstyrsmålingsfeil, ikke den faktiske kabletilstanden.
Imidlertid er det ikke alltid gyldig å vurdere lederens sentrering ved like signalstyrker. Biot-Savarts lov sier at: magnetinduksjonsintensiteten (B) opprettet av en strømlement Idl i et hvilket som helst punkt i rommet på avstand r er:

Denne formelen indikerer at magnetinduksjonsintensiteten er omvendt proporsjonal med kvadratet av avstanden og proporsjonal med sinus av retningssvingen θ, som vist i figur 2.

Basert på dette, utføres en simulering av forholdet mellom magnetfeltintensitetene i fire punkter i rommet. For enkelhet er et modell som vist i figur 3 opprettet.

Punkter 1, 2, 3 og 4 er ortogonalt og symmetrisk fordelt, med O som sentrumpunkt. La strømlementet bevege seg langs midtlinjen OP av akser 2 og 3. Ifølge formel (1), når strømlementet er i ethvert punkt på OP, holder B1 = B4 og B2 = B3. Dermed trenger man bare å undersøke variasjonen av B1/B2 med ∠θ. Etter beregning, får man en sett med data, og genererer en scatter trendgraf, som vist i tabell 1 og figur 4.

Som vist i figur 4, er trenden en uregelmessig kurve. Når ∠θ øker, synker B1/B2 fra 1 til ca. 0.268 (min), og stiger deretter tilbake til 1. Mens magnetfeltene i fire punkter jevnliges, er strømlementet langt unna sentrum O. I intervallet, har hver verdi (unntatt min) to punkter – nærere min, er punktene nærmere.
Dette gjelder for ett kvadrant, og det samme gjelder for de andre. Å stole på fire-punkt magnetfeltmagnitude kan ikke vurdere lederens sentrering eller bestemme dens senter (magnetfelt er en vektor, ikke en skalar).
Derfor, for å utvikle en bedre eksentrimeter, unngå blindt følge utenlandske firmaer. Et nytt prinsipp: måle magnetfeltretningssvinger θ₁, θ₂ ved P₁/P₂ for å bestemme kilde-senter O (figur 5).

Dette prinsippet er geometrisk summarisert som: En trekant er unikt bestemt av en side og to naboinkluderte vinkler. Mens dette holder, krever praktisk implementering høyhastighets, høy-nøyaktig måling av svake magnetfelt.
Kabelledere inducerer ~10mA strøm i eksterne alternerende felt. Sensorene, plassert fra kablene, oppdager svake (~tiere nT) felt – krever høy sensitivitet, frekvensrespons og lav støy (innhered støy påvirker nøyaktigheten).
3 Implementering av elektromagnetisk induksjonsbaserede eksentrimetere
De fleste importerte produkter bruker spolsensorer; denne artikkelen velger magnetoresistive sensorer. Små sensorer integrerer elektromagnetisk/optisk måling på samme tverrsnitt (minimerer feil), med høy sensor-konsistens. Fotolitografiske magnetoresistive sensorer er ideelle. I motsetning til dette, adskiller importerte spolsensorprodukter målinger, behandler ikke-optiske ledersegmenter som identiske – øker feil.
Magnetoresistiv-baserte målinger: 1000/s målinger, ±2% repetitivitet (100–200nT), ±0.2% for 1000-måling gjennomsnitt, linearitet <0.5%. Sammenligninger med importerte er begrenset (ingen data).
Kombinert med hurtig LED×CCD optisk måling muliggjør sanntidseksentrihetsmåling (figur 6).
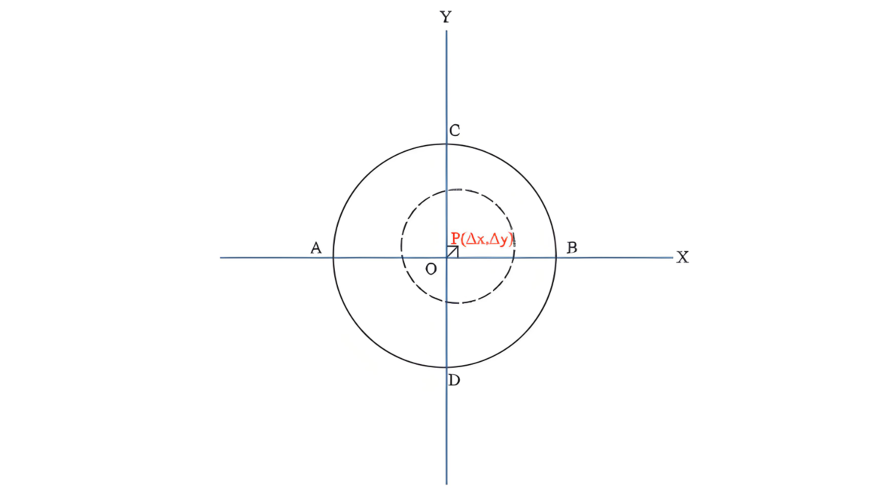
Under hver måling, hentes posisjonene til fire punkter (A, B, C, D) på isolasjonslaget og posisjonen til lederens sentrumpunkt P synkront. Eksenstriheten i X- og Y-retninger og total eksentrisitet beregnes ved hjelp av følgende formler:
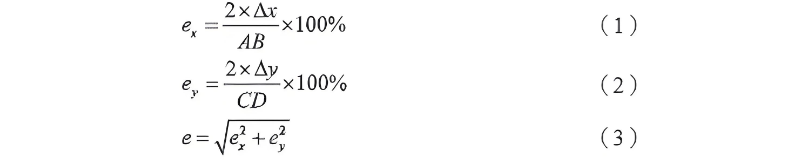
For hver måling, gjennomsnittes ex, ey, og e (over et angitt antall prøver) som det endelige eksentrisitetsresultatet. For å vise koncentrisitet, bruk Concentricity = 1 - Eccentricity. Δx/Δy (X/Y-retning avvik) tillater sanntidseksentrihetskorrigering av ekstruderhode.
Høyere målehastigheter reduserer svingningsfeil: 1000 målinger/sekund oppnår tusendels-nøyaktighet. De fleste importerte produkter (hundrevis av målinger/sekund) hevder eksentrisitetsnøyaktighet under forutsetning av en sentrert leder (matcher ytre diameternøyaktighet, gitt som ±μm absolutte verdier, ikke prosent – ikke i samsvar).
3.1 LED×CCD diametermåling
Basert på telecentrisk optikk, bruker den lysblokkering for å opprette lys/mørke CCD-områder. Algoritmer analyserer kanter for å beregne dimensjoner. Global CCD-eksponering (samtidig pikseloppfanging) fører til kantforurensning (vertikal → skjeve linjer), men algoritmer løser kanter og eliminere feil.
3.2 Notater om optisk diametermåling
Ikke fokuset, men nøkkel: Kabel-eksentrisitetmåling krever sanntids-optisk opptak av fire isolasjonslag-topp-posisjoner (ikke bare dimensjoner). Motor-skannede lasermetoder risikerer asynkron-målingsfeil. Derfor, synkronisering av optiske og elektromagnetiske målinger er kritisk for instrumentutvikling.
4 Konklusjon
Det elektromagnetisk induksjonsbaserede instrumentet måler hurtig ledens elektriske senter, med lav kostnad og fordel. Ved å adressere importerte produkters elektromagnetiske målingsfeil, utvikles en ny fotoelektromagnetisk kabel-eksentrimeter (tusendels-nøyaktighet). Teknologi utvikler seg – fremtidige materialfremskritt vil tillate høyere nøyaktighet, som driver industriell fremgang.










