
オンラインケーブル偏心測定における主要な課題は、ケーブルの高速移動です。これにはケーブルの振動に対応できる非接触式測定装置が必要です。X線ケーブル偏心計は光学透過画像に基づいて多層の輪郭寸法を測定し、絶縁体の偏心に対する導体の幾何学的な中心を計算します。しかし、これらには欠点があります:測定速度が遅い(秒間に数回)、ケーブルの振動による誤差の増加、高コスト。
1 電磁誘導に基づくケーブル偏心計の原理
電磁誘導に基づくケーブル偏心計は、光直径測定と電磁誘導による導体検出を組み合わせています。導体の電気的中心(幾何学的な偏心よりも優れています)を秒間に数千回の高速で測定します。高速測定により振動の影響が減少し、多層寸法の要求がない場合にX線デバイスを置き換えます。
現在輸入されている製品(公表された原理に基づく)は、4つの誘導コイルを使用して磁場を検出しています(図1参照)。一部の製品は信号強度が等しいことを基準に導体の中心位置を決定し(等しくない場合はモーターでウィンドウを調整)、他の製品は検出された信号強度から導体の中心を計算します。

2 測定精度制御
モーター調整にはプロセスが必要であり、必然的に遅延が生じます。これにより絶縁体と導体の測定が同期しなくなり、遅延誤差が発生します。より激しいケーブルの振動ほど誤差は大きくなります。実際には、この欠点が現れます:ケーブルが振動すると、偏心測定結果が不安定になり、変動が1%を超えることがあります。これは装置の測定誤差であり、実際のケーブルの状態を反映しているわけではありません。
しかし、信号強度が等しいかどうかだけで導体の中心位置を判断することは常に有効ではありません。ビオ・サバールの法則によれば、ある点での磁束密度(B)は、距離rにある任意の点において、電流要素Idlによって励起される磁場の強さは次の式で表されます:

この式は、磁束密度が距離の二乗に反比例し、方向角θの正弦に比例することを示しています(図2参照)。

これを基に、空間内の4点における磁場強度の関係についてシミュレーション計算を行いました。便宜上、図3のようなモデルを立てました。

点1、2、3、4は直交対称に配置され、Oが中心点です。電流要素が軸2と3の中線OP沿いに動くと仮定します。式(1)によれば、電流要素がOP上の任意の点にあるとき、B1 = B4およびB2 = B3が成り立ちます。したがって、B1/B2の角度θに対する変化だけを調べる必要があります。計算後、一連のデータが得られ、散布トレンドグラフが生成されます(表1および図4参照)。

図4から明らかなように、トレンドは不規則な曲線です。角度θが増加するにつれて、B1/B2は1から約0.268(最小値)まで下がり、再び1に戻ります。4点の磁場が等しくなる間、電流要素は中心Oから遠ざかります。この間隔内では、各値(最小値を除く)は2つの点を持ちます—最小値に近づくほど、これらの点は近くなります。
これは1つの象限について言及しており、他の象限でも同様です。4点の磁場強度だけでは導体の中心位置を判断したり、その中心を決定することはできません(磁場はベクトルであり、スカラーではありません)。
したがって、より良い偏心計を開発するためには、外国企業の方法を盲目的に追従すべきではありません。新しい原理:P₁/P₂における磁場方向角θ₁、θ₂を測定してソース中心Oを決定します(図5参照)。

この原理は幾何学的に要約すると次のようになります:1つの辺と2つの隣接する角度によって三角形は一意に決定されます。この原理に基づいても、実装には弱い磁場の高速かつ高精度な測定が必要です。
ケーブルの導体は外部の交流フィールドで約10mAの電流を誘導します。センサーはケーブルから離れた位置に配置され、弱い(数十nT程度)磁場を検出します—高感度、高周波数応答、低ノイズ(固有のノイズが精度に影響します)が必要です。
3 電磁誘導に基づく偏心計の実装
多くの輸入製品はコイルセンサーを使用していますが、本論文では磁気抵抗センサーを選択しました。小型のセンサーは同じ断面内で電磁気的および光学的な測定を統合し(誤差を最小限に抑え)、センサー間の一貫性が高いです。リソグラフィベースの磁気抵抗センサーは理想的です。一方、輸入のコイルセンサー製品は測定を分離し、非光学的な導体セグメントを同一とみなすことにより誤差が増えます。
磁気抵抗に基づく測定:1000/秒の測定、±2%の再現性(100-200nT)、1000回平均±0.2%、直線性<0.5%。輸入品との比較は限定的です(データなし)。
高速LED×CCD光学測定との組み合わせにより、リアルタイムの偏心測定が可能になります(図6参照)。
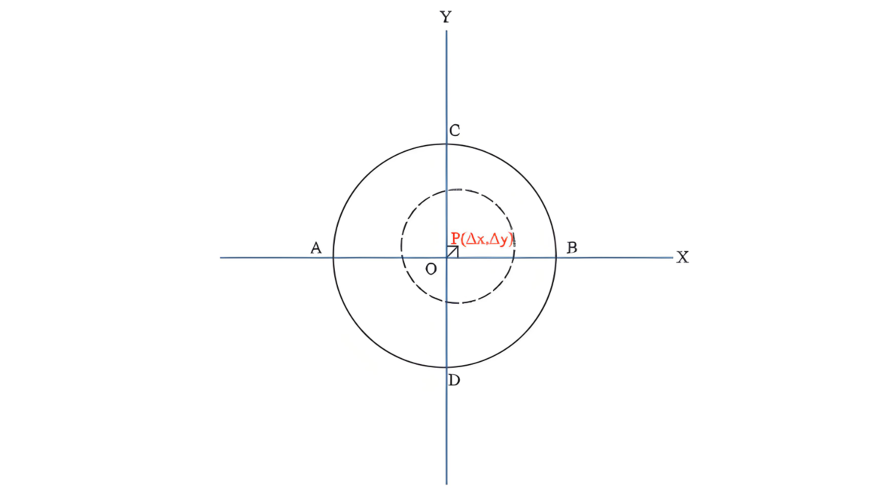
各測定時に、絶縁層の4点(A、B、C、D)の位置と導体中心点Pの位置を同時に取得します。X方向とY方向の偏心および総偏心は以下の式を使用して計算します:
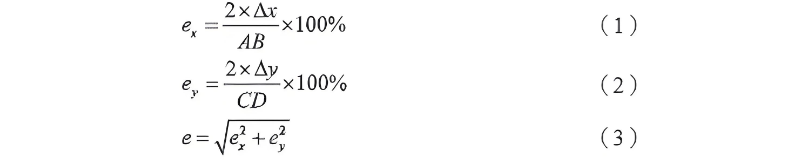
各測定に対して、ex、ey、およびeは一定数のサンプルで平均化され、最終的な偏心結果となります。同心度を表示するには、同心度 = 1 - 偏心度を使用します。Δx/Δy(X/Y方向の偏差)により、押出機ヘッドのリアルタイム調整を行い、自動的にケーブルの偏心を修正できます。
高速な測定により振動誤差が減少します:1000測定/秒で小数第三位までの精度を達成します。多くの輸入製品(数百測定/秒)は、導体が中心にあると仮定した偏心精度を主張します(外径精度と一致し、±μmの絶対値で示され、パーセント表示ではない—適合しない)。
3.1 LED×CCD直径測定
テレセントリック光学に基づいており、光遮断により明暗のCCD領域を作成します。アルゴリズムはエッジを解析して寸法を計算します。グローバルCCD露光(同時にピクセルを感知)により、振動によるエッジのぼけ(垂直→傾斜線)が生じますが、アルゴリズムはエッジを解決し、誤差を排除します。
3.2 光学直径測定に関する注意点
焦点ではないが重要な点:ケーブルの偏心測定では、単に寸法だけでなく、絶縁層の4つの頂点位置をリアルタイムで光学的に取得する必要があります。モータースキャンレーザー方式は非同期測定誤差のリスクがあります。したがって、光学測定と電磁気測定の同期は、計器開発にとって重要です。
4 結論
電磁誘導に基づく計器は導体の電気的中心を高速に測定でき、低コストで優れた利点があります。輸入製品の電磁気測定の欠点に対処し、新たな光電磁気ケーブル偏心計を開発しました(小数第三位までの精度)。技術は進化し続けるでしょう—将来の材料の進歩により、より高い精度が可能になり、業界の進歩を促進します。










