
Cabaran utama dalam pengukuran eksentrik kabel secara dalam talian adalah pergerakan kabel yang cepat. Ini memerlukan peralatan pengukuran tanpa sentuhan yang dapat mengendalikan gegaran kabel. Eksentrikimeter kabel sinar-X, berdasarkan pencitraan transmisi optik, mengukur dimensi kontur pelapisan untuk mengira pusat geometri konduktor berbanding eksentrik isolasi. Walau bagaimanapun, mereka mempunyai kekurangan: kelajuan pengukuran yang perlahan (hanya beberapa kali setiap saat), peningkatan ralat dari gegaran kabel, dan kos yang tinggi.
1 Prinsip Eksentrikimeter Kabel Berasaskan Induksi Elektromagnetik
Eksentrikimeter kabel berasaskan induksi elektromagnetik menggabungkan pengukuran diameter optik dan induksi elektromagnetik untuk pendeteksian konduktor. Mereka mengukur pusat elektrik konduktor (lebih baik daripada eksentrik geometri), dengan kelajuan tinggi ribuan pengukuran setiap saat. Kelajuan pengukuran yang lebih cepat mengurangkan impak gegaran, menggantikan peranti sinar-X dalam skenario tanpa keperluan dimensi pelapisan berbilang lapis.
Produk import semasa (berdasarkan prinsip awam) menggunakan empat gegelung induksi untuk mendeteksi medan magnet (seperti dalam Gambar 1). Sesetengah menentukan pemusat konduktor melalui kekuatan isyarat yang sama (menyesuaikan tetingkap dengan motor jika tidak sama); yang lain mengira pusat konduktor daripada kekuatan isyarat yang dikesan.

2 Kawalan Ketepatan Pengukuran
Penyesuaian motor melibatkan proses, tidak dapat dielakkan menyebabkan lag. Ini menyebabkan desinkronisasi antara pengukuran isolasi dan konduktor, mencipta ralat jangka masa—gegaran kabel yang lebih serius menghasilkan ralat yang lebih besar. Dalam amalan, cacat ini muncul: jika terdapat gegaran kabel, hasil pengukuran eksentrik menjadi tidak stabil, dengan fluktuasi melebihi 1%. Ini mencerminkan ralat pengukuran peralatan, bukan keadaan kabel sebenar.
Walau bagaimanapun, menilai pemusat konduktor berdasarkan kekuatan isyarat yang sama tidak selalu sah. Hukum Biot-Savart menyatakan: intensiti induksi magnet (B) yang dipancarkan oleh unsur arus Idl pada mana-mana titik dalam ruang pada jarak r adalah:

Formula ini menunjukkan bahawa intensiti induksi magnet berbanding songsang dengan kuasa dua jarak dan berbanding lurus dengan sinus sudut arah θ, seperti ditunjukkan dalam Gambar 2.

Berdasarkan ini, pengiraan simulasi hubungan antara intensiti medan magnet pada empat titik dalam ruang dilakukan. Untuk kemudahan, model seperti ditunjukkan dalam Gambar 3 dibuat.

Titik 1, 2, 3, dan 4 tersebar secara ortogonal dan simetri, dengan O sebagai titik pusat. Biarkan unsur arus bergerak sepanjang garis tengah OP paksi 2 dan 3. Mengikut Formula (1), apabila unsur arus berada pada mana-mana titik pada OP, B1 = B4 dan B2 = B3 berlaku. Oleh itu, hanya variasi B1/B2 dengan ∠θ perlu diperiksa. Selepas pengiraan, satu set data diperoleh, dan graf trend scatter dibuat, seperti ditunjukkan dalam Jadual 1 dan Gambar 4.

Seperti yang dilihat dalam Gambar 4, trendnya adalah lengkung tidak beraturan. Apabila ∠θ meningkat, B1/B2 turun dari 1 hingga ~0.268 (min), kemudian naik kembali ke 1. Walaupun medan magnet pada empat titik disamakan, unsur arus berada jauh dari pusat O. Dalam selang, setiap nilai (kecuali min) mempunyai dua titik—lebih dekat ke min, titik-titik tersebut lebih dekat.
Ini berlaku untuk satu suku, dan hal yang sama berlaku untuk suku-suku lain. Bergantung kepada magnitud medan magnet empat titik tidak dapat menilai pemusat konduktor atau menentukan pusatnya (medan magnet adalah vektor, bukan skalar).
Oleh itu, untuk mengembangkan eksentrikimeter yang lebih baik, hindari mengikuti syarikat asing secara buta. Prinsip baru: ukur sudut arah medan magnet θ₁, θ₂ di P₁/P₂ untuk menentukan pusat sumber O (Gambar 5).

Prinsip ini secara geometri diringkaskan sebagai: Segitiga unik ditentukan oleh satu sisi dan dua sudut yang bertentangan. Sementara ini berlaku, pelaksanaan praktikal memerlukan pengukuran laju, tepat medan magnet lemah.
Konduktor kabel menginduksi arus ~10mA dalam medan bolak-balik luar. Sensor, yang berjarak dari kabel, mendeteksi medan lemah (~puluhan nT)—memerlukan sensitiviti, respons frekuensi, dan bunyi rendah (bunyi bawaan mempengaruhi ketepatan).
3 Pelaksanaan Eksentrikimeter Berasaskan Induksi Elektromagnetik
Kebanyakan produk import menggunakan sensor gegelung; artikel ini memilih sensor magnetoreseptif. Sensor berukuran kecil mengintegrasikan pengukuran elektromagnetik/optik pada bahagian rentasan yang sama (mengurangkan ralat), dengan konsistensi antara sensor yang tinggi. Sensor magnetoreseptif berdasarkan litografi adalah ideal. Sebaliknya, produk import berbasis sensor gegelung memisahkan pengukuran, menganggap segmen konduktor non-optik sebagai identik—meningkatkan ralat.
Pengukuran berdasarkan magnetoreseptif: 1000/s pengukuran, ±2% ulangan (100-200nT), ±0.2% untuk purata 1000 pengukuran, linearitas <0.5%. Perbandingan dengan import terhad (tiada data).
Dengan menggabungkan pengukuran optik LED×CCD yang cepat membolehkan pengukuran eksentrik secara real-time (Gambar 6).
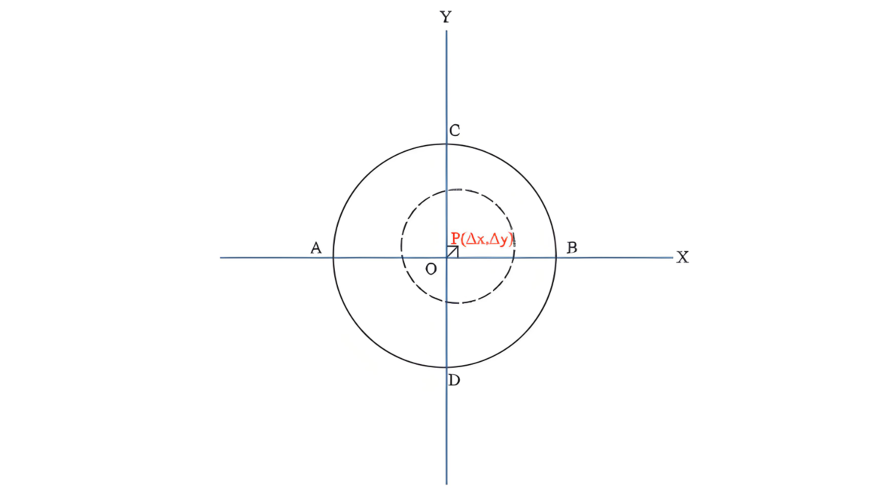
Semasa setiap pengukuran, kedudukan empat titik (A, B, C, D) pada lapisan isolasi dan kedudukan titik pusat konduktor P diperoleh secara serentak. Eksentrik dalam arah X dan Y serta eksentrik total dikira menggunakan formula berikut:
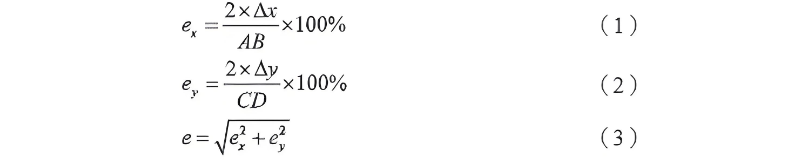
Untuk setiap pengukuran, ex, ey, dan e dipuratakan (atas jumlah sampel tertentu) sebagai hasil eksentrik akhir. Untuk menunjukkan keselarian, gunakan Keselarian = 1 - Eksentrik. Δx/Δ y (penyimpangan arah X/Y) membolehkan penyesuaian kepala ekstruder secara real-time untuk koreksi eksentrik kabel secara automatik.
Kelajuan pengukuran yang lebih cepat mengurangkan ralat gegaran: 1000 pengukuran/sekon mencapai ketepatan tempat ribuan. Kebanyakan produk import (ratusan pengukuran/sekon) mengklaim ketepatan eksentrik dengan mengandaikan konduktor yang berpusat (sesuai dengan ketepatan diameter luar, diberikan sebagai ±μm nilai absolut, bukan peratusan—tidak sesuai).
3.1 Pengukuran Diameter LED×CCD
Berdasarkan optik telecentric, ia menggunakan penyekatan cahaya untuk mencipta kawasan CCD cerah-gelap. Algoritma menganalisis tepi untuk mengira dimensi. Paparan global CCD (pengesan piksel serentak) menyebabkan kaburnya tepi akibat gegaran (mendatar→garis condong), tetapi algoritma menyelesaikan tepi dan menghilangkan ralat.
3.2 Nota Pengukuran Diameter Optik
Bukan fokus, tetapi penting: Pengukuran eksentrik kabel memerlukan penangkapan optik real-time empat posisi verteks lapisan isolasi (bukan hanya dimensi). Kaedah laser yang dipindai dengan motor berisiko ralat pengukuran tidak serentak. Oleh itu, sinkronisasi pengukuran optik dan elektromagnetik adalah kritikal untuk pembangunan instrumen.
4 Kesimpulan
Instrumen berdasarkan induksi elektromagnetik mengukur pusat elektrik konduktor dengan cepat, dengan kos rendah dan kelebihan. Menangani kekurangan pengukuran elektromagnetik produk import, meter eksentrik kabel fotokomagnetik yang inovatif telah dikembangkan (ketepatan tempat ribuan). Teknologi berkembang—kemajuan bahan masa depan akan memungkinkan ketepatan yang lebih tinggi, mendorong kemajuan industri.










