
অনলাইন কেবল অক্ষদূরতা পরিমাপের একটি মূল চ্যালেঞ্জ হল কেবলের উচ্চ-গতির গতিবেগ। এটি নন-কন্টাক্ট পরিমাপ যন্ত্রপাতির প্রয়োজন যা কেবলের দোলন সম্পর্কিত হতে পারে। X-রশ্মি ভিত্তিক কেবল অক্ষদূরতা পরিমাপক, আলোক প্রেরণ ছবি ভিত্তিক, বহু-স্তরের রেখাচিত্র মাপ করে পরিবাহী ও পরিবাহী অক্ষদূরতার জ্যামিতিক কেন্দ্র হিসাব করে। তবে এগুলির কিছু দৈন্য রয়েছে: ধীর পরিমাপ গতি (এক সেকেন্ডে শুধু কয়েকবার), কেবলের দোলন থেকে বৃদ্ধি প্রভাব, এবং উচ্চ খরচ।
১ তড়িৎচুম্বকীয় আবেশ ভিত্তিক কেবল অক্ষদূরতা পরিমাপকের নীতি
তড়িৎচুম্বকীয় আবেশ ভিত্তিক কেবল অক্ষদূরতা পরিমাপক আলোক ব্যাস পরিমাপ এবং তড়িৎচুম্বকীয় আবেশ যৌথভাবে পরিবাহী শনাক্ত করে। এটি পরিবাহীর তড়িৎ কেন্দ্র (জ্যামিতিক অক্ষদূরতার তুলনায় উন্নত) পরিমাপ করে, এক সেকেন্ডে হাজার হাজার পরিমাপ করে। দ্রুত পরিমাপ দোলন প্রভাব কমায়, এবং বহু-স্তরের মাপের প্রয়োজন ছাড়াই X-রশ্মি যন্ত্রপাতির পরিবর্তে ব্যবহার করা হয়।
বর্তমানে আমদানি করা পণ্যগুলি (প্রকাশ্য নীতি অনুযায়ী) চারটি আবেশ কয়েল ব্যবহার করে চৌম্বক ক্ষেত্র শনাক্ত করে (যেমন চিত্র ১)। কিছু পণ্য সমান সংকেত শক্তি দ্বারা পরিবাহী কেন্দ্র নির্ধারণ করে (যদি সমান না হয় তাহলে মোটর দ্বারা উইন্ডো সমায়োজন করে); অন্যরা শনাক্ত করা সংকেত শক্তি থেকে পরিবাহী কেন্দ্র গণনা করে।

২ পরিমাপ সুনিশ্চিতি নিয়ন্ত্রণ
মোটর সমায়োজন একটি প্রক্রিয়া নিয়ে যায়, যা অনিবার্যভাবে দেরি ঘটায়। এটি পরিবাহী এবং পরিবাহী পরিমাপের মধ্যে অনুপস্থিতি তৈরি করে, যা দেরি ত্রুটি সৃষ্টি করে- বেশি দোলন থেকে বড় ত্রুটি হয়। প্রায়শই, এই দোষ প্রকাশ পায়: যদি কেবল দোলন ঘটে, তাহলে অক্ষদূরতা পরিমাপের ফলাফল অস্থির হয়, এবং ১% বেশি দোলন হয়। এটি যন্ত্রপাতির পরিমাপ ত্রুটি প্রতিফলিত করে, নয় কেবলের বাস্তব অবস্থা প্রতিফলিত করে।
তবে, সমান সংকেত শক্তি দ্বারা পরিবাহী কেন্দ্র নির্ধারণ সর্বদা সত্য নয়। বিওট-সাভার্টের সূত্র অনুযায়ী: কোনও বিন্দুতে বিদ্যুৎ উপাদান Idl দ্বারা উত্তেজিত চৌম্বক আবেশ B এর তীব্রতা r দূরত্বে:

এই সূত্র দেখায় যে, চৌম্বক আবেশের তীব্রতা দূরত্বের বর্গের বিপরীত অনুপাতে এবং দিক কোণ θ-এর সাইনের সমানুপাতে, যা চিত্র ২-তে দেখানো হয়েছে।

এর উপর ভিত্তি করে, চারটি বিন্দুতে চৌম্বক ক্ষেত্রের তীব্রতার সম্পর্কের একটি সিমুলেশন গণনা করা হয়। সুবিধার জন্য, চিত্র ৩-তে একটি মডেল প্রতিষ্ঠিত হয়।

বিন্দু ১, ২, ৩, এবং ৪ লম্বভাবে এবং প্রতিসমভাবে বিতরণ করা হয়, O হল কেন্দ্র বিন্দু। ধরা হয় যে, বিদ্যুৎ উপাদান ২ এবং ৩ এর অক্ষের মধ্যবর্তী মধ্যরেখা OP বরাবর চলে। সূত্র (১) অনুযায়ী, যখন বিদ্যুৎ উপাদান OP-এর যেকোনও বিন্দুতে থাকে, B1 = B4 এবং B2 = B3 সত্য হয়। তাই, শুধুমাত্র B1/B2-এর পরিবর্তন অনুসরণ করা প্রয়োজন। গণনা করার পর, একটি ডেটা সেট প্রাপ্ত হয়, এবং একটি ছিটানো ট্রেন্ড গ্রাফ তৈরি করা হয়, যা টেবিল ১ এবং চিত্র ৪-তে দেখানো হয়েছে।

চিত্র ৪-তে দেখা যায়, ট্রেন্ড একটি অনিয়মিত বক্ররেখা। যখন ∠θ বৃদ্ধি পায়, B1/B2 ১ থেকে ~০.২৬৮ (মিনিমাম) পর্যন্ত কমে, তারপর আবার ১-এ বেড়ে যায়। যখন চারটি বিন্দুতে চৌম্বক ক্ষেত্র সমান হয়, তখন বিদ্যুৎ উপাদান O থেকে দূরে থাকে। এই অন্তরালে, প্রতিটি মান (মিনিমাম ব্যতীত) দুটি বিন্দু রয়েছে- মিনিমামের কাছাকাছি, বিন্দুগুলি নিকটবর্তী।
এটি একটি চতুর্ভূজের জন্য প্রযোজ্য, এবং অন্যান্য চতুর্ভূজের জন্যও একই প্রযোজ্য। চারটি বিন্দুতে চৌম্বক ক্ষেত্রের মান দিয়ে পরিবাহী কেন্দ্র নির্ধারণ বা তার কেন্দ্র নির্ধারণ করা যায় না (চৌম্বক ক্ষেত্র একটি ভেক্টর, নয় স্কেলার)।
তাই, একটি ভাল অক্ষদূরতা পরিমাপক উন্নয়ন করার জন্য, বিদেশী ফার্মগুলির পিছনে অন্ধভাবে যাওয়া এড়ানো উচিত। একটি নতুন নীতি: P₁/P₂-তে চৌম্বক ক্ষেত্রের দিক কোণ θ₁, θ₂ পরিমাপ করে উৎস কেন্দ্র O নির্ধারণ করা (চিত্র ৫)।

এই নীতি জ্যামিতিকভাবে সংক্ষিপ্ত করা হয়: একটি ত্রিভুজ একটি বাহু এবং দুটি সন্নিহিত অন্তর্ভুক্ত কোণ দ্বারা অনন্যভাবে নির্ধারিত হয়। যদিও এটি সত্য, তবে বাস্তব বাস্তবায়নের জন্য দুর্বল চৌম্বক ক্ষেত্রের উচ্চ-গতি, উচ্চ-পরিশোধন পরিমাপ প্রয়োজন।
কেবল পরিবাহী বাহ্যিক পরিবর্তনশীল ক্ষেত্রে প্রায় ১০মিএ বিদ্যুৎ উত্পন্ন করে। সেন্সরগুলি, কেবল থেকে দূরে স্থাপন করা হয়, দুর্বল (~ডজন ন্যানোটেসলা) ক্ষেত্র শনাক্ত করে- যা উচ্চ সংবেদনশীলতা, ফ্রিকোয়েন্সি প্রতিক্রিয়া, এবং কম শব্দ (অন্তর্নিহিত শব্দ সুনিশ্চিততা প্রভাবিত করে) প্রয়োজন।
৩ তড়িৎচুম্বকীয় আবেশ ভিত্তিক অক্ষদূরতা পরিমাপকের বাস্তবায়ন
সর্বাধিক আমদানি করা পণ্যগুলি কয়েল সেন্সর ব্যবহার করে; এই প্রবন্ধে চুম্বকীয় রোধ সেন্সর নির্বাচিত হয়। ছোট আকারের সেন্সরগুলি একই অনুভূমিক সেকশনে তড়িৎচুম্বকীয়/আলোক পরিমাপ একীভূত করে (ত্রুটি কমায়), সেন্সরগুলির মধ্যে উচ্চ সঙ্গতি। লিথোগ্রাফি ভিত্তিক চুম্বকীয় রোধ সেন্সর আদর্শ। তুলনায়, আমদানি করা কয়েল-সেন্সর পণ্যগুলি পরিমাপ পৃথক করে, অ-আলোক পরিবাহী সেগমেন্টগুলিকে একই হিসাবে বিবেচনা করে- যা ত্রুটি বৃদ্ধি করে।
চুম্বকীয় রোধ ভিত্তিক পরিমাপ: ১০০০/সেকেন্ড পরিমাপ, ±২% পুনরাবৃত্তি (১০০-২০০nT), ১০০০-পরিমাপের গড়ে ±০.২%, রৈখিকতা <০.৫%। আমদানি করা সাথে তুলনা সীমিত (কোনও ডেটা নেই)।
দ্রুত LED×CCD আলোক পরিমাপ সমন্বয়ে বাস্তব-সময় অক্ষদূরতা পরিমাপ সম্ভব (চিত্র ৬)।
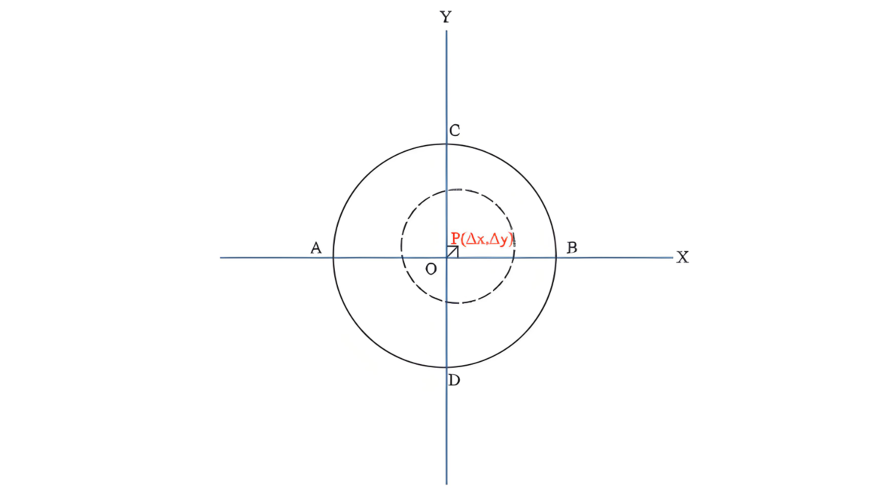
প্রতিটি পরিমাপে, পরিবাহী স্তরের চারটি বিন্দু (A, B, C, D) এবং পরিবাহী কেন্দ্র বিন্দু P-এর অবস্থান সমন্বিতভাবে প্রাপ্ত হয়। X এবং Y দিকের এবং মোট অক্ষদূরতা নিম্নলিখিত সূত্রগুলি ব্যবহার করে গণনা করা হয়:
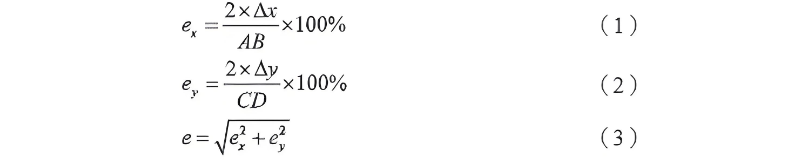
প্রতিটি পরিমাপের জন্য, \(e_x\), \(e_y\), এবং e একটি নির্ধারিত সংখ্যক নমুনার গড় (ফাইনাল অক্ষদূরতা ফলাফল) হিসাবে প্রদর্শিত হয়। কেন্দ্রীয়তা প্রদর্শনের জন্য, কেন্দ্রীয়তা = ১ - অক্ষদূরতা ব্যবহার করা হয়। Δx/Δy (X/Y-দিকের বিচ্যুতি) বাস্তব-সময় এক্সট্রুডার হেড সমন্বয়ে স্বয়ংক্রিয় কেবল অক্ষদূরতা সংশোধন সম্ভব।
দ্রুত পরিমাপ গতি দোলন ত্রুটি কমায়: ১০০০ পরিমাপ/সেকেন্ড হাজার তারিখে সুনিশ্চিততা অর্জন করে। সর্বাধিক আমদানি করা পণ্যগুলি (শত পরিমাপ/সেকেন্ড) পরিবাহী কেন্দ্রিত হওয়া অনুমান করে অক্ষদূরতা সুনিশ্চিততা দাবি করে (বাইরের ব্যাসের সুনিশ্চিততা সাথে মিলে, ±μm পরম মান, শতাংশ নয়- অনুমোদিত নয়)।
৩.১ LED×CCD ব্যাস পরিমাপ
টেলিসেন্ট্রিক অপটিক্স ভিত্তিক, এটি আলোক রোধ ব্যবহার করে CCD অঞ্চলে উজ্জ্বল-অন্ধকার তৈরি করে। অ্যালগরিদমগুলি প্রান্তগুলি বিশ্লেষণ করে মাপ করে। গ্লোবাল CCD এক্সপোজার (সাথে সাথে পিক্সেল সেন্সিং) দোলন-প্ররোচিত প্রান্ত বিবর্ণ (ভার্টিক্যাল→স্ল্যান্টেড লাইন) কারণ হয়, তবে অ্যালগরিদম প্রান্তগুলি সমাধান করে এবং ত্রুটি দূর করে।
৩.২ আলোক ব্যাস পরিমাপের নোট
এটি ফোকাস নয়, কিন্তু গুরুত্বপূর্ণ: কেবল অক্ষদূরতা পরিমাপের জন্য চারটি পরিবাহী স্তরের শীর্ষ বিন্দুর বাস্তব-সময় আলোক ধারণ প্রয়োজন (শুধু মাত্রা নয়)। মোটর-স্ক্যান লেজার পদ্ধতি অনুপাত পরিমাপ ত্রুটির ঝুঁকি রাখে। তাই, আলোক এবং তড়িৎচুম্বকীয় পরিমাপের সমন্বয় যন্ত্রপাতি উন্নয়নের জন্য গুরুত্বপূর্ণ।
৪ সংক্ষিপ্তসার
তড়িৎচুম্বকীয় আবেশ ভিত্তিক যন্ত্রপাতি দ্রুত পরিবাহীর তড়িৎ কেন্দ্র পরিমাপ করে, কম খরচ এবং সুবিধা রয়েছে। আমদানি করা পণ্যগুলির তড়িৎচুম্বকীয় পরিমাপের দৈন্য সমাধান করে, একটি নতুন ফোটো-তড়িৎচুম্বকীয় কেবল অক্ষদূরতা পরিমাপক উন্নয়ন করা হয় (হাজার তারিখে সুনিশ্চিততা)। প্রযুক্তি প্রগতিশীল- ভবিষ্যতের পদার্থ উন্নতি উচ্চতর সুনিশ্চিততা সম্ভব করবে, যা শিল্প প্র










