
온라인 케이블 편심 측정의 핵심 도전 과제는 케이블의 고속 움직임입니다. 이를 위해서는 케이블 진동을 처리할 수 있는 비접촉식 측정 장비가 필요합니다. X-레이 케이블 편심계는 광학 전송 영상을 기반으로 다층 윤곽 차원을 측정하여 절연 편심에 대한 도체의 기하학적 중심을 계산합니다. 그러나 이러한 방법에는 단점이 있습니다: 느린 측정 속도(초당 몇 번만), 케이블 진동으로 인한 오류 증가, 그리고 높은 비용.
1 전자기 유도 기반 케이블 편심계 원리
전자기 유도 기반 케이블 편심계는 광학 직경 측정과 전자기 유도를 결합하여 도체 감지를 수행합니다. 이들은 도체의 전기 중심(기하학적 편심보다 우수)을 초당 수천 번의 측정 속도로 측정합니다. 더 빠른 측정은 진동 영향을 줄이고, 다층 차원 요구 사항이 없는 시나리오에서는 X-레이 장치를 대체합니다.
현재 수입 제품(공개된 원칙에 따름)은 네 개의 유도 코일을 사용하여 자기장을 감지합니다(그림 1 참조). 일부는 동일한 신호 강도를 통해 도체 중심을 결정하며(불균등하면 모터로 창 조정), 다른 일부는 감지된 신호 강도로부터 도체 중심을 계산합니다.

2 측정 정밀도 제어
모터 조정은 과정을 거치므로 불가피하게 지연이 발생합니다. 이로 인해 절연과 도체 측정 사이에 동기화가 맞지 않아 지연 오류가 발생합니다. 더욱 심각한 케이블 진동은 더 큰 오류를 초래합니다. 실제로, 이 결함은 다음과 같이 나타납니다: 케이블 진동이 발생하면 편심 측정 결과가 불안정해지고, 1% 이상의 변동이 발생합니다. 이는 실제 케이블 상태가 아닌 장비 측정 오류를 반영합니다.
그러나 동일한 신호 강도로 도체 중심을 판단하는 것은 항상 유효하지 않습니다. 비오타-사바르의 법칙에 따르면: 어떤 점에서의 자기 유도 강도(B)는 전류 요소 Idl에 의해 r 거리에서 다음과 같이 주어집니다:

이 공식은 자기 유도 강도가 거리의 제곱에 반비례하고 방향 각 θ의 사인에 비례함을 나타냅니다. 그림 2 참조.

이를 바탕으로 공간의 네 점에서의 자기장 강도 간의 관계에 대한 시뮬레이션 계산이 수행됩니다. 편의상 그림 3과 같은 모델을 설정합니다.

점 1, 2, 3, 4는 O를 중심으로 직교 및 대칭적으로 분포되어 있습니다. 현재 요소가 축 2와 3의 중앙선 OP를 따라 이동한다고 가정합니다. 공식 (1)에 따르면, 현재 요소가 OP의 어느 점에서도 B1 = B4이고 B2 = B3가 성립합니다. 따라서 B1/B2의 ∠θ에 따른 변화만 확인하면 됩니다. 계산 후 데이터 세트를 얻고 산포 추세 그래프를 생성합니다. 표 1과 그림 4 참조.

그림 4에서 볼 수 있듯이, 추세는 불규칙한 곡선입니다. ∠θ가 증가함에 따라 B1/B2는 1에서 약 0.268(최소값)까지 감소한 다음 다시 1로 증가합니다. 네 점의 자기장이 같아질 때, 현재 요소는 중심 O에서 멀어집니다. 이 구간에서 각 값(최소값을 제외하고)은 두 점을 가지며, 최소값에 가까울수록 점이 가깝습니다.
이는 한 사분면에 적용되며, 다른 사분면에서도 마찬가지입니다. 네 점의 자기장 크기를 기준으로 도체 중심을 판단하거나 결정할 수 없습니다(자기장은 벡터, 스칼라가 아닙니다).
따라서 더 나은 편심계를 개발하려면 외국 기업을 맹목적으로 따르지 말아야 합니다. 새로운 원칙: P₁/P₂에서 자기장 방향 각 θ₁, θ₂를 측정하여 소스 중심 O를 결정합니다(그림 5 참조).

이 원리는 기하학적으로 다음과 같이 요약될 수 있습니다: 한 변과 두 인접한 포함 각으로 삼각형은 유일하게 결정됩니다. 이 원칙은 실현 가능하지만, 약한 자기장의 고속, 고정밀 측정이 필요합니다.
케이블 도체는 외부 교류 필드에서 약 10mA의 전류를 유도합니다. 센서는 케이블에서 일정 거리를 두고 약한 (~수십 nT) 자기장을 감지하며, 이는 높은 감도, 주파수 응답, 저 노이즈(본질적인 노이즈가 정확도에 영향)를 요구합니다.
3 전자기 유도 기반 편심계의 구현
대부분의 수입 제품은 코일 센서를 사용하지만, 본 논문은 자기저항 센서를 선택합니다. 소형 센서는 동일한 단면에서 전자기 및 광학 측정을 통합하여 오류를 최소화하고, 센서 간 일관성이 높습니다. 리소그래피 기반 자기저항 센서는 이상적입니다. 반면, 수입 코일 센서 제품은 측정을 분리하여 비광학 도체 부분을 동일하게 취급하여 오류가 증가합니다.
자기저항 기반 측정: 1000/s 측정, ±2% 재현성(100-200nT), 1000회 측정 평균 ±0.2%, 선형성 <0.5%. 수입 제품과의 비교는 제한적입니다(데이터 없음).
빠른 LED×CCD 광학 측정과 결합하여 실시간 편심 측정이 가능합니다(그림 6 참조).
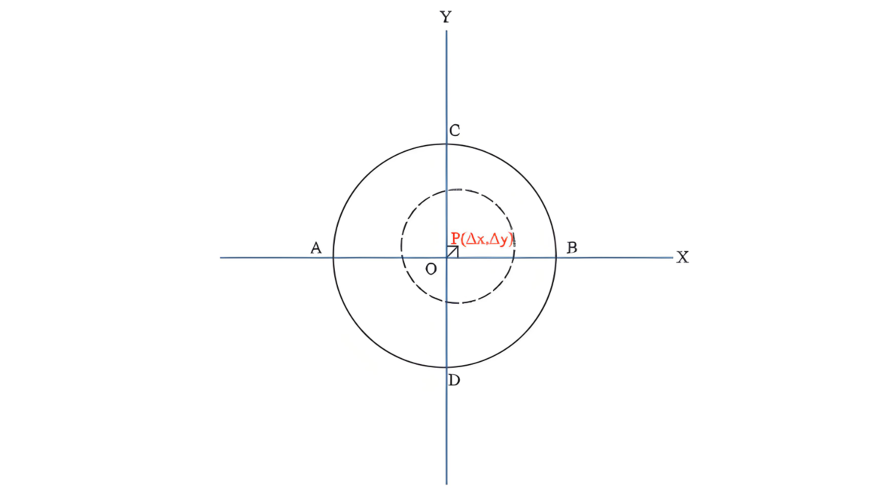
각 측정 시 절연층의 네 점(A, B, C, D) 위치와 도체 중심점 P의 위치를 동시에 얻습니다. X 및 Y 방향의 편심과 전체 편심은 다음 공식을 사용하여 계산됩니다:
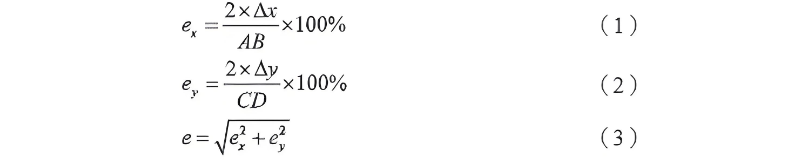
각 측정 시 ex, ey, 및 e는 (샘플 수에 따라) 평균을 내어 최종 편심 결과로 삼습니다. 중심성을 표시하기 위해 Concentricity = 1 - Eccentricity를 사용합니다. Δx/Δ y(X/Y 방향 편차)는 자동 케이블 편심 보정을 위한 실시간 압출 머리 조정을 가능하게 합니다.
더 빠른 측정 속도는 진동 오류를 줄입니다: 1000 측정/초는 천분의 자리 정확도를 달성합니다. 대부분의 수입 제품(수백 측정/초)은 도체가 중심에 있다고 가정한 편심 정확도를 주장합니다(외부 직경 정밀도와 일치, ±μm 절대값, 백분율이 아닌 - 준수되지 않음).
3.1 LED×CCD 직경 측정
텔레센트릭 광학을 기반으로, 빛 차단을 통해 CCD 영역의 밝음과 어두움을 생성합니다. 알고리즘은 가장자리를 분석하여 차원을 계산합니다. 전역 CCD 노출(동시 픽셀 감지)은 진동으로 인한 가장자리 흐림(수직→기울어진 선)을 초래하지만, 알고리즘은 가장자리를 해결하고 오류를 제거합니다.
3.2 광학 직경 측정 참고사항
주요 포인트는 아니지만, 중요한 사항: 케이블 편심 측정은 단순히 차원뿐만 아니라 실시간으로 절연층의 네 꼭짓점 위치를 광학적으로 캡처해야 합니다. 모터 스캔 레이저 방법은 비동기 측정 오류 위험이 있습니다. 따라서 광학 및 전자기 측정의 동기화는 기기 개발에 중요합니다.
4 결론
전자기 유도 기반 기기는 도체의 전기 중심을 빠르게 측정하며, 낮은 비용과 장점이 있습니다. 수입 제품의 전자기 측정 결함을 해결하여 새로운 광전자기 케이블 편심계를 개발했습니다(천분의 자리 정확도). 기술은 발전하고 있으며, 미래의 재료 발전은 더 높은 정밀도를 가능하게 하여 산업 발전을 촉진할 것입니다.










