
Tantangan inti dalam pengukuran eksentrisitas kabel online adalah gerakan kabel yang sangat cepat. Ini membutuhkan peralatan pengukuran tanpa kontak yang dapat menangani getaran kabel. Eksentrimeter kabel berbasis sinar-X, yang didasarkan pada pencitraan transmisi optik, mengukur dimensi kontur multi-lapis untuk menghitung pusat geometris konduktor relatif terhadap eksentrisitas isolasi. Namun, mereka memiliki kekurangan: kecepatan pengukuran yang lambat (hanya beberapa kali per detik), peningkatan kesalahan dari getaran kabel, dan biaya yang tinggi.
1 Prinsip Eksentrimeter Kabel Berbasis Induksi Elektromagnetik
Eksentrimeter kabel berbasis induksi elektromagnetik menggabungkan pengukuran diameter optik dan induksi elektromagnetik untuk deteksi konduktor. Mereka mengukur pusat listrik konduktor (lebih unggul dibandingkan eksentrisitas geometris), dengan kecepatan tinggi ribuan pengukuran per detik. Kecepatan pengukuran yang lebih cepat mengurangi dampak getaran, menggantikan perangkat sinar-X dalam skenario tanpa persyaratan dimensi multi-lapis.
Produk impor saat ini (berdasarkan prinsip umum) menggunakan empat kumparan induktif untuk mendeteksi medan magnet (seperti pada Gambar 1). Beberapa menentukan penempatan pusat konduktor melalui kekuatan sinyal yang sama (menyesuaikan jendela dengan motor jika tidak setara); yang lain menghitung pusat konduktor dari kekuatan sinyal yang terdeteksi.

2 Kontrol Ketepatan Pengukuran
Penyesuaian motor melibatkan proses, yang tak terhindarkan menyebabkan lag. Ini menyebabkan desinkronisasi antara pengukuran isolasi dan konduktor, menciptakan kesalahan penundaan—getaran kabel yang lebih parah menghasilkan kesalahan yang lebih besar. Dalam praktiknya, kelemahan ini muncul: jika terjadi getaran kabel, hasil pengukuran eksentrisitas menjadi tidak stabil, dengan fluktuasi melebihi 1%. Ini mencerminkan kesalahan pengukuran peralatan, bukan kondisi kabel sebenarnya.
Namun, menilai penempatan pusat konduktor berdasarkan kekuatan sinyal yang sama tidak selalu valid. Hukum Biot-Savart menyatakan: intensitas induksi magnetik (B) yang dihasilkan oleh elemen arus Idl di titik mana pun dalam ruang pada jarak r adalah:

Rumus ini menunjukkan bahwa intensitas induksi magnetik berbanding terbalik dengan kuadrat jarak dan berbanding lurus dengan sinus sudut arah θ, seperti ditunjukkan pada Gambar 2.

Berdasarkan ini, dilakukan perhitungan simulasi hubungan antara intensitas medan magnet di empat titik dalam ruang. Untuk kemudahan, dibuat model seperti pada Gambar 3.

Titik 1, 2, 3, dan 4 tersebar secara ortogonal dan simetris, dengan O sebagai titik pusat. Misalkan elemen arus bergerak sepanjang garis tengah OP sumbu 2 dan 3. Menurut Rumus (1), ketika elemen arus berada di titik mana pun pada OP, B1 = B4 dan B2 = B3 berlaku. Dengan demikian, hanya perlu diperiksa variasi B1/B2 dengan ∠θ. Setelah perhitungan, diperoleh satu set data, dan grafik tren scatter dibuat, seperti ditunjukkan pada Tabel 1 dan Gambar 4.

Seperti terlihat pada Gambar 4, trennya adalah kurva yang tidak teratur. Seiring bertambahnya ∠θ, B1/B2 turun dari 1 hingga ~0.268 (min), lalu naik kembali ke 1. Sementara medan magnet di empat titik sama, elemen arus jauh dari pusat O. Dalam interval tersebut, setiap nilai (kecuali min) memiliki dua titik—semakin dekat ke min, titik-titik tersebut semakin dekat.
Ini berlaku untuk satu kuadran, dan hal yang sama berlaku untuk kuadran lainnya. Bergantung pada magnitudo medan magnet empat titik tidak dapat menentukan penempatan pusat konduktor atau menentukan pusatnya (medan magnet adalah vektor, bukan skalar).
Oleh karena itu, untuk mengembangkan eksentrimeter yang lebih baik, hindari mengikuti perusahaan asing secara buta. Prinsip baru: ukur sudut arah medan magnet θ₁, θ₂ di P₁/P₂ untuk menentukan pusat sumber O (Gambar 5).

Prinsip ini secara geometris diringkas sebagai: Segitiga ditentukan secara unik oleh satu sisi dan dua sudut termasuk yang berdekatan. Meskipun ini berlaku, implementasi praktis memerlukan pengukuran kecepatan tinggi dan presisi tinggi dari medan magnet lemah.
Konduktor kabel menginduksi arus ~10mA dalam medan bolak-balik eksternal. Sensor, yang dipisahkan dari kabel, mendeteksi medan lemah (~puluhan nT)—membutuhkan sensitivitas, respons frekuensi, dan noise rendah (noise inheren mempengaruhi akurasi).
3 Implementasi Eksentrimeter Berbasis Induksi Elektromagnetik
Sebagian besar produk impor menggunakan sensor kumparan; makalah ini memilih sensor resistansi magnet. Sensor berukuran kecil mengintegrasikan pengukuran elektromagnetik dan optik pada bagian lintang yang sama (meminimalkan kesalahan), dengan konsistensi antar-sensor yang tinggi. Sensor resistansi magnet berbasis litografi ideal. Sebaliknya, produk impor berbasis sensor kumparan memisahkan pengukuran, menganggap segmen konduktor non-optik identik—meningkatkan kesalahan.
Pengukuran berbasis resistansi magnet: 1000/s pengukuran, ulang ±2% (100–200nT), ±0.2% untuk rata-rata 1000 pengukuran, linieritas <0.5%. Perbandingan dengan impor terbatas (tidak ada data).
Dikombinasikan dengan pengukuran optik LED×CCD yang cepat memungkinkan pengukuran eksentrisitas real-time (Gambar 6).
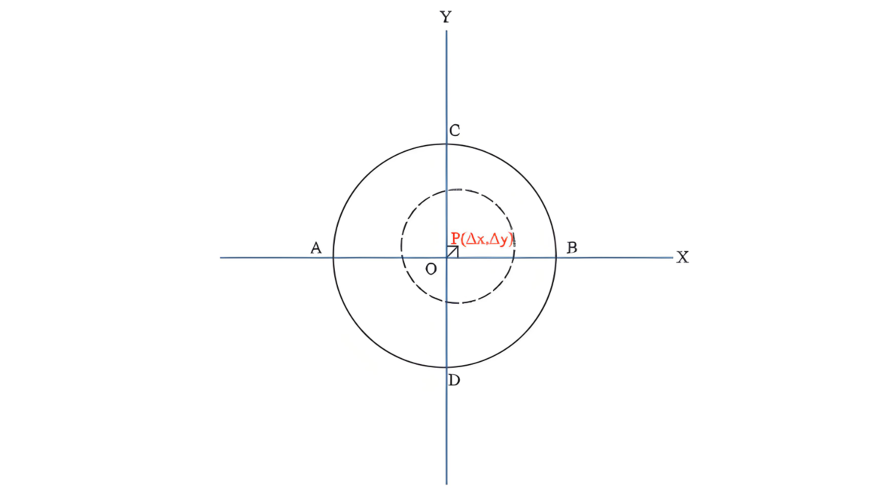
Selama setiap pengukuran, posisi empat titik (A, B, C, D) pada lapisan isolasi dan posisi titik pusat konduktor P diperoleh secara sinkron. Eksentrisitas dalam arah X dan Y serta eksentrisitas total dihitung menggunakan rumus berikut:
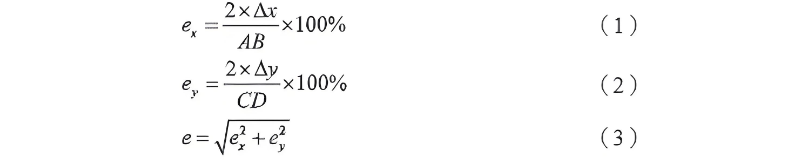
Untuk setiap pengukuran, ex, ey, dan e dihitung rata-rata (dari jumlah sampel tertentu) sebagai hasil eksentrisitas akhir. Untuk menampilkan kesetaraan, gunakan Kesetaraan = 1 - Eksentrisitas. Δx/Δy (deviasi arah X/Y) memungkinkan penyesuaian kepala extruder secara real-time untuk koreksi eksentrisitas kabel otomatis.
Kecepatan pengukuran yang lebih cepat mengurangi kesalahan getaran: 1000 pengukuran/detik mencapai akurasi ribuan. Sebagian besar produk impor (ratusan pengukuran/detik) mengklaim akurasi eksentrisitas dengan asumsi konduktor berpusat (sesuai dengan presisi diameter luar, diberikan sebagai nilai absolut ±μm, bukan persentase—tidak sesuai).
3.1 Pengukuran Diameter LED×CCD
Berdasarkan optik telecentric, ini menggunakan penyumbatan cahaya untuk membuat wilayah CCD terang-gelap. Algoritma menganalisis tepi untuk menghitung dimensi. Paparan global CCD (sensing pixel secara simultan) menyebabkan buram tepi akibat getaran (vertikal→garis miring), tetapi algoritma menyelesaikan tepi dan menghilangkan kesalahan.
3.2 Catatan Pengukuran Diameter Optik
Bukan fokus, tetapi penting: Pengukuran eksentrisitas kabel memerlukan penangkapan optik real-time dari empat posisi puncak lapisan isolasi (bukan hanya dimensi). Metode laser yang dipindai dengan motor berisiko kesalahan pengukuran asinkron. Oleh karena itu, sinkronisasi pengukuran optik dan elektromagnetik sangat krusial untuk pengembangan instrumen.
4 Kesimpulan
Instrumen berbasis induksi elektromagnetik mengukur pusat listrik konduktor dengan cepat, dengan biaya rendah dan keuntungan. Mengatasi kekurangan pengukuran elektromagnetik produk impor, dikembangkan meter eksentrisitas kabel fotoelektromagnetik baru (akurasi ribuan tempat). Teknologi berkembang—peningkatan material di masa depan akan memungkinkan presisi yang lebih tinggi, mendorong kemajuan industri.










