
Основною проблемою вимірювання ексцентриситету кабелю в онлайн-режимі є високоскоростне рухання кабелю. Це вимагає неприкосновного обладнання для вимірювання, яке може вирішувати проблему дригання кабелю. Ексцентромери на основі рентгенівських променів, засновані на оптичному передавальному зображення, вимірюють контурні розміри багаторівневих структур, щоб обчислити геометричний центр провідників відносно ексцентриситету ізоляції. Однак у них є недоліки: повільна швидкість вимірювання (лише кілька разів за секунду), збільшення помилок через дригання кабелю та висока вартість.
1 Принцип ексцентромерів на основі електромагнітної індукції
Ексцентромери на основі електромагнітної індукції поєднують оптичне вимірювання діаметру та електромагнітну індукцію для виявлення провідників. Вони вимірюють електричний центр провідника (що надає перевагу над геометричним ексцентриситетом) з високою швидкістю тисяч вимірювань за секунду. Швидше вимірювання зменшує вплив дригання, замінюючи рентгенівські пристрої в сценаріях без потреби у багаторівневих розмірах.
Поточні імпортовані продукти (за загальнодоступними принципами) використовують чотири індуктивні катушки для виявлення магнітних полів (як показано на малюнку 1). Деякі визначають центрування провідника через рівну силу сигналу (регулюючи вікно з допомогою двигунів, якщо сили не рівні); інші обчислюють центр провідника за виявленими силами сигналу.

2 Контроль точності вимірювання
Регулювання з допомогою двигунів включає процес, що необхідно призводить до затримки. Це призводить до розсинхронізації між вимірюваннями ізоляції та провідника, створюючи похибки затримки — більш серйозне дригання кабелю призводить до більших помилок. На практиці цей недолік проявляється так: якщо відбувається дригання кабелю, результати вимірювання ексцентриситету стають нестабільними, з коливаннями, що перевищують 1%. Це відображає похибку вимірювання обладнання, а не реальний стан кабелю.
Однак, визначення центрування провідника через рівну силу сигналу не завжди правильне. Закон Біо-Савара стверджує: індукційна інтенсивність магнітного поля (B), спричинена елементом струму Idl в будь-якій точці простору на відстані r, є:

Ця формула показує, що індукційна інтенсивність обернено пропорційна квадрату відстані та прямо пропорційна синусу кута напрямку θ, як показано на малюнку 2.

На основі цього проводиться моделювання зв'язку між інтенсивностями магнітного поля в чотирьох точках простору. Для зручності створюється модель, як показано на малюнку 3.

Точки 1, 2, 3 та 4 розташовані ортогонально та симетрично, з O як центральною точкою. Нехай елемент струму переміщується вздовж серединної лінії OP осей 2 і 3. Згідно з формулою (1), коли елемент струму знаходиться в будь-якій точці на OP, B1 = B4 і B2 = B3. Тому, потрібно лише вивчити зміну B1/B2 з ∠θ. Після обчислення отримується набір даних, і створюється графік розсіяння, як показано в таблиці 1 та на малюнку 4.

Як видно на малюнку 4, тенденція є нерегулярною кривою. Коли ∠θ збільшується, B1/B2 падає з 1 до ~0.268 (мінімум), а потім знову піднімається до 1. Коли магнітні поля в чотирьох точках рівні, елемент струму далеко від центру O. У цьому інтервалі кожне значення (окрім мінімуму) має дві точки — ближче до мінімуму, точки ближчі одна до одної.
Це стосується одного квадранту, і те саме справедливо для інших. Спираючись на величини магнітного поля в чотирьох точках, неможливо визначити центрування провідника або його центр (магнітне поле — це вектор, а не скаляр).
Тому, для розробки кращого ексцентромера не слід сліпо дотримуватися закордонних фірм. Новий принцип: вимірювати кути напрямку магнітного поля θ₁, θ₂ в P₁/P₂, щоб визначити центр джерела O (малюнок 5).

Цей принцип геометрично підсумовується так: трикутник однозначно визначається одним боком та двома суміжними кутами. Хоча це вірно, практична реалізація вимагає високоскоростного та високоточного вимірювання слабких магнітних полів.
Провідники кабелю викликають приблизно 10 мА струму в зовнішніх змінних полях. Датчики, розташовані на віддаленні від кабелів, виявляють слабкі (~десятки нТ) поля — це вимагає високої чутливості, частотної характеристики та низького шуму (внутрішній шум впливає на точність).
3 Реалізація ексцентромерів на основі електромагнітної індукції
Більшість імпортованих продуктів використовують датчики на основі катушок; ця стаття вибирає магнеторезистивні датчики. Малих розмірів датчики поєднують електромагнітні та оптичні вимірювання на одному перерізі (що мінімізує помилки) з високою послідовністю між датчиками. Літографічні магнеторезистивні датчики є ідеальними. Натомість, імпортовані продукти на основі катушкових датчиків розділяють вимірювання, вважаючи непровідні сегменти провідників ідентичними — що збільшує помилки.
Вимірювання на основі магнеторезистивних датчиків: 1000 вимірювань за секунду, повторюваність ±2% (100–200 нТ), ±0.2% для середнього 1000 вимірювань, лінійність <0.5%. Порівняння з імпортованими продуктами обмежене (немає даних).
Поєднання з швидким оптичним вимірюванням LED×CCD дозволяє вести реальний час вимірювання ексцентриситету (малюнок 6).
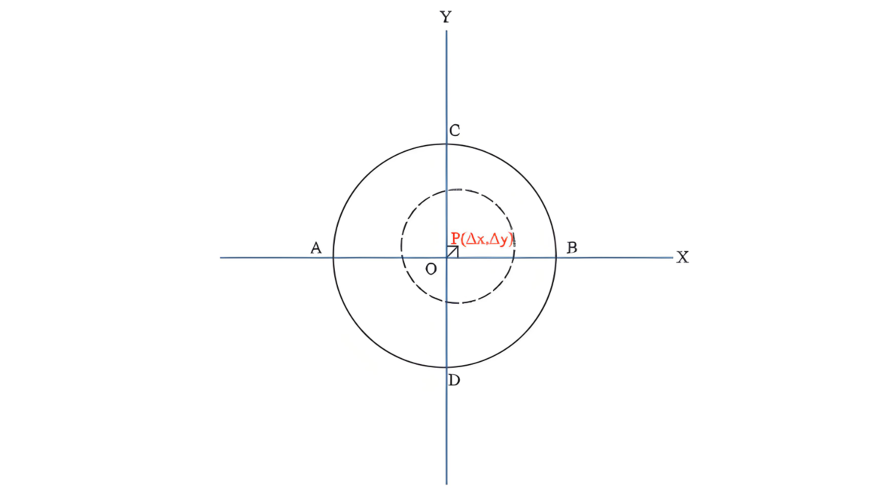
Під час кожного вимірювання синхронно отримуються положення чотирьох точок (A, B, C, D) на шарі ізоляції та положення центральної точки провідника P. Ексцентриситети в напрямках X і Y та загальний ексцентриситет обчислюються за наступними формулами:
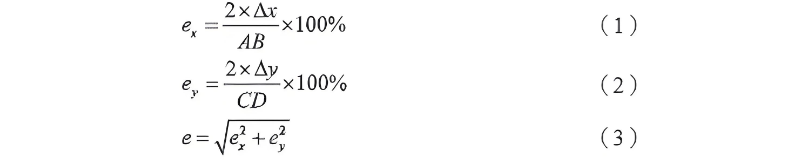
Для кожного вимірювання ex, ey та e усереднюються (за заданою кількістю зразків) як фінальний результат ексцентриситету. Для відображення концентричності використовується Concentricity = 1 - Eccentricity. Δx/Δy (відхилення в напрямках X/Y) дозволяють проводити реальні часові корекції головки екструдера для автоматичної корекції ексцентриситету кабелю.
Швидші швидкості вимірювання зменшують помилки через дригання: 1000 вимірювань за секунду забезпечують точність до тисячних. Більшість імпортованих продуктів (сотні вимірювань за секунду) заявляють про точність ексцентриситету, припускаючи центральне розташування провідника (що відповідає точності зовнішнього діаметра, даної як ± мкм абсолютні значення, а не відсотки — не відповідає стандартам).
3.1 Вимірювання діаметру за допомогою LED×CCD
На основі телецентричної оптики, використовується затенення світла для створення світлих та темних областей CCD. Алгоритми аналізують краї, щоб обчислити розміри. Глобальне зображення CCD (спостереження всіх пікселів одночасно) призводить до розмиття країв через дригання (вертикальні → нахилені лінії), але алгоритми вирішують цю проблему та усувають помилки.
3.2 Зауваження щодо оптичного вимірювання діаметру
Хоча це не основна частина, але ключова: вимірювання ексцентриситету кабелю вимагає реального часу оптичного захоплення позицій чотирьох вершин шару ізоляції (не лише розмірів). Методи сканування лазером з допомогою двигунів можуть призводити до помилок асинхронних вимірювань. Тому, синхронізація оптичних та електромагнітних вимірювань є критично важливою для розробки приладу.
4 Висновок
Прилад на основі електромагнітної індукції швидко вимірює електричний центр провідника, маючи невелику вартість та переваги. Вирішуючи недоліки електромагнітних вимірювань імпортованих продуктів, розроблено новий фотоелектромагнітний ексцентромер (точність до тисячних). Технології розвиваються — майбутні досягнення в матеріалах дозволять досягти більшої точності, що сприятиме прогресу відомства.










