
Een kernuitdaging bij de online meting van kabel-eccentriciteit is de hoge snelheid van de kabel. Dit vereist meetapparatuur zonder contact die kabeltrillingen kan verwerken. Röntgenkabel-eccentricimeters, gebaseerd op optische transmissie-imaging, meten meervoudige lagencontouren om het geometrisch middelpunt van geleiders ten opzichte van isolatie-eccentriciteit te berekenen. Echter, ze hebben nadelen: langzame meettijd (slechts enkele malen per seconde), toegenomen fouten door kabeltrillingen en hoge kosten.
1 Principe van elektromagnetische inductie-gebaseerde kabel-eccentricimeters
Elektromagnetische inductie-gebaseerde kabel-eccentricimeters combineren optische diametermeting en elektromagnetische inductie voor geleiderdetectie. Ze meten het elektrische middelpunt van de geleider (superieur aan geometrische eccentriciteit) met een hoge snelheid van duizenden metingen per seconde. Snellere meting vermindert trillingseffecten, waardoor ze röntgenapparatuur vervangen in scenario's zonder meervoudige dimensie-eisen.
Huidige geïmporteerde producten (volgens openbare principes) gebruiken vier inductieve spoelen om magnetische velden te detecteren (zoals in Figuur 1). Sommige bepalen het geleidercentrum via gelijke signaalsterkte (bij ongelijke sterkte wordt het venster met motoren aangepast); anderen berekenen het geleidercentrum uit de gedetecteerde signaalsterkte.

2 Controle van meetnauwkeurigheid
Motorregeling betreft een proces, wat onvermijdelijk leidt tot vertraging. Dit veroorzaakt desynchronisatie tussen isolatie- en geleidermetingen, wat leidt tot vertragingfouten - ernstigere kabeltrillingen resulteren in grotere fouten. In de praktijk manifesteert dit zich als volgt: bij kabeltrillingen worden de eccentriciteitsmeetresultaten instabiel, met fluctuaties die 1% overschrijden. Dit weerspiegelt de meetfout van de apparatuur, niet de werkelijke kabelconditie.
Echter, het beoordelen van het geleidercentrum op basis van gelijke signaalsterkte is niet altijd geldig. De wet van Biot-Savart stelt: de magnetische inductiesterkte (B) opgewekt door een stroomelement Idl op elk punt in de ruimte op afstand r is:

Deze formule geeft aan dat de magnetische inductiesterkte omgekeerd evenredig is met het kwadraat van de afstand en evenredig met de sinus van de richtingshoek θ, zoals getoond in Figuur 2.

Op basis hiervan wordt een simulatieberekening van het verband tussen de magnetische veldsterkten op vier punten in de ruimte uitgevoerd. Voor gemak wordt een model zoals in Figuur 3 opgesteld.

Punten 1, 2, 3 en 4 zijn orthogonaal en symmetrisch verdeeld, met O als het middelpunt. Laat het stroomelement bewegen langs de middenlijn OP van assen 2 en 3. Volgens Formule (1), wanneer het stroomelement zich op elk punt op OP bevindt, geldt B1 = B4 en B2 = B3. Dus hoeft alleen de variatie van B1/B2 met ∠θ te worden onderzocht. Na berekening wordt een set gegevens verkregen en wordt een scattertrendgrafiek gegenereerd, zoals getoond in Tabel 1 en Figuur 4.

Zoals te zien in Figuur 4, is de trend een onregelmatige curve. Terwijl ∠θ toeneemt, daalt B1/B2 van 1 naar ~0,268 (min), en stijgt dan terug naar 1. Wanneer de magnetische velden op vier punten gelijk zijn, is het stroomelement ver van het middelpunt O. In het interval heeft elke waarde (behalve min) twee punten - dichter bij min, zijn de punten dichterbij.
Dit geldt voor één kwadrant, en hetzelfde geldt voor de andere. Het vertrouwen op de magnitudes van vierpuntsmagnetische velden kan geen oordeel vellen over het geleidercentrum of het centrum bepalen (magnetisch veld is een vector, geen scalaire).
Daarom, om een betere eccentricimeter te ontwikkelen, moet men niet blindelings buitenlandse bedrijven volgen. Een nieuw principe: meet de richtingshoeken θ₁, &θ₂ op P₁/P₂ om het broncentrum O te bepalen (Figuur 5).

Dit principe wordt geometrisch samengevat als: Een driehoek wordt uniek bepaald door één zijde en twee aangrenzende ingesloten hoeken. Terwijl dit geldt, vereist de praktische implementatie snelle, nauwkeurige meting van zwakke magnetische velden.
Kabelgeleiders induceren ~10mA stroom in externe wisselvelden. Sensoren, gescheiden van kabels, detecteren zwakke (~tientallen nT) velden - wat hoge gevoeligheid, frequentierespons en lage ruis (inherent geruis beïnvloedt nauwkeurigheid) vereist.
3 Implementatie van elektromagnetische inductie-gebaseerde eccentricimeters
Meeste geïmporteerde producten gebruiken spoelsensoren; dit artikel selecteert magnetoresistieve sensoren. Kleine sensoren integreren elektromagnetische/optische metingen op dezelfde doorsnede (minimaliseert fouten), met hoge consistentie tussen sensoren. Lithografie-gebaseerde magnetoresistieve sensoren zijn ideaal. In tegenstelling hiermee behandelen geïmporteerde spoelsensorproducten metingen apart, wat de niet-optische geleidersegmenten identiek maakt - wat fouten vergroot.
Magnetoresistieve metingen: 1000/s metingen, ±2% herhaalbaarheid (100-200nT), ±0,2% voor 1000-metingengemiddelden, lineariteit <0,5%. Vergelijkingen met imports zijn beperkt (geen gegevens).
Samen met snelle LED×CCD optische meting maakt dit real-time eccentriciteitsmeting mogelijk (Figuur 6).
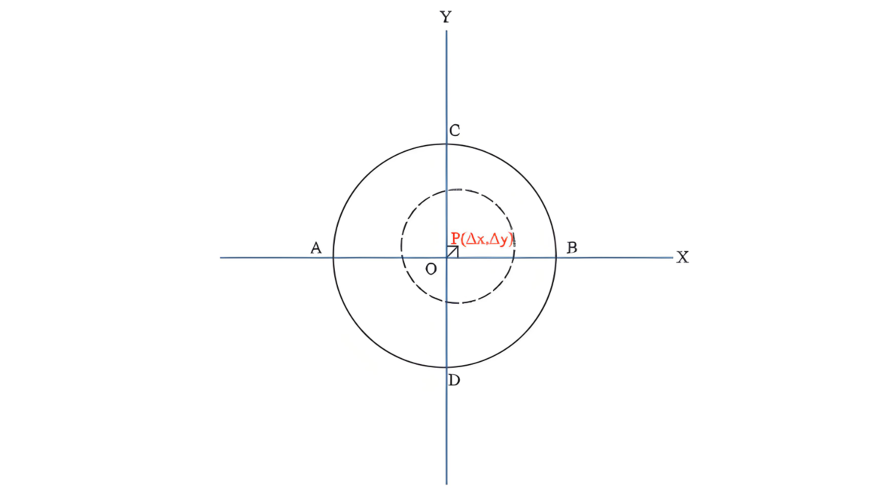
Tijdens elke meting worden de posities van vier punten (A, B, C, D) op de isolatielaag en de positie van het geleidercentrum P synchroon verkregen. De eccentriciteit in de X- en Y-richting en de totale eccentriciteit worden berekend met de volgende formules:
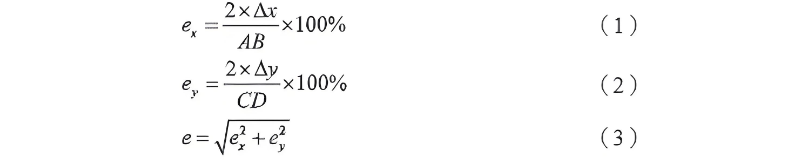
Voor elke meting worden ex, ey, en e gemiddeld (over een vast aantal monsters) als het eindresultaat van de eccentriciteit. Om concentriciteit weer te geven, gebruik Concentriciteit = 1 - Eccentriciteit. Δx/Δ y (X/Y-richtingsafwijkingen) stellen real-time aanpassingen van de extruderkop in staat voor automatische correctie van kabeleccentriciteit.
Snellere meetsnelheden verminderen trillingsfouten: 1000 metingen per seconde bereiken precisie op duizendste plaats. Meeste geïmporteerde producten (honderden metingen per seconde) claimen eccentriciteitsnauwkeurigheid met een gecentreerde geleider (overeenkomstig buitendiameterprecisie, gegeven als ±μm absolute waarden, geen percentages - niet-compliant).
3.1 LED×CCD Diametermeting
Gebaseerd op telecentrische optica, gebruikt het lichtblokkering om heldere-donkere CCD-regio's te creëren. Algoritmen analyseren randen om dimensies te berekenen. Globale CCD-belichting (gelijktijdige pixelwaarneming) veroorzaakt trilling-induceerde randversluiering (verticaal→schuine lijnen), maar algoritmen lossen randen op en elimineren fouten.
3.2 Opmerkingen over optische diametermeting
Niet het focus, maar cruciaal: Kabeleccentriciteitsmeting vereist real-time optische vastlegging van de posities van vier isolatielaag-hoekpunten (niet alleen dimensies). Motor-gescande lasermethoden lopen risico op asynchrone meetfouten. Daarom is synchronisatie van optische en elektromagnetische metingen cruciaal voor de ontwikkeling van het instrument.
4 Conclusie
Het elektromagnetische inductie-gebaseerde instrument meet snel het elektrische middelpunt van de geleider, met lage kosten en voordelen. Door de tekortkomingen van geïmporteerde producten in elektromagnetische metingen aan te pakken, is een nieuwe foto-elektromagnetische kabeleccentriciteitsmeter ontwikkeld (duizendste plaats precisie).Technologie evolueert - toekomstige materiaalvoortgang zal hogere precisie mogelijk maken, wat de industrie vooruit helpt.










