
Podstawowym wyzwaniem w online pomiarze ekscentryczności kabla jest szybkie ruchy kabla. Wymaga to sprzętu do pomiarów bezkontaktowych, który może radzić sobie z drżeniem kabla. Urządzenia do pomiaru ekscentryczności kabla oparte na promieniach X, bazując na optycznym obrazowaniu transmisyjnym, mierzą wielowarstwowe wymiary konturu, aby obliczyć geometryczny środek przewodników względem ekscentryczności izolacji. Jednak mają one wady: wolna prędkość pomiaru (tylko kilka razy na sekundę), zwiększone błędy spowodowane drżeniem kabla oraz wysokie koszty.
1 Zasada działania urządzeń do pomiaru ekscentryczności kabla opartych na indukcji elektromagnetycznej
Urządzenia do pomiaru ekscentryczności kabla oparte na indukcji elektromagnetycznej łączą pomiar średnicy optycznej i detekcję przewodnika za pomocą indukcji elektromagnetycznej. Mierzą elektryczny środek przewodnika (lepszy niż geometryczna ekscentryczność) z dużą prędkością tysięcy pomiarów na sekundę. Szybsze pomiary zmniejszają wpływ drżeń, zastępując urządzenia rentgenowskie w scenariuszach, w których nie ma potrzeby wymiarów wielowarstwowych.
Obecne importowane produkty (według publicznych zasad) używają czterech cewek indukcyjnych do detekcji pól magnetycznych (jak pokazano na Rysunku 1). Niektóre określają centrowanie przewodnika poprzez równą siłę sygnału (dostosowując okno silnikami, jeśli siły są nierówne); inne obliczają środek przewodnika na podstawie wykrytej siły sygnału.

2 Kontrola dokładności pomiaru
Dostosowanie silników wiąże się z procesem, co nieuniknionie powoduje opóźnienie. To prowadzi do dezynchronizacji między pomiarami izolacji i przewodnika, tworząc błędy opóźnienia – im większe drżenie kabla, tym większe błędy. W praktyce ten defekt objawia się tak, że jeśli wystąpi drżenie kabla, wyniki pomiaru ekscentryczności stają się niestabilne, z fluktuacjami przekraczającymi 1%. Odbija to błąd pomiaru sprzętu, a nie rzeczywiste stan kabla.
Jednak ocena centrowania przewodnika na podstawie równej siły sygnału nie jest zawsze prawidłowa. Prawo Biot-Savarta mówi, że natężenie indukcji magnetycznej (B) wywołane przez element prądowy Idl w dowolnym punkcie przestrzeni w odległości r wynosi:

Ta formuła wskazuje, że natężenie indukcji magnetycznej jest odwrotnie proporcjonalne do kwadratu odległości i proporcjonalne do sinus kąta kierunkowego θ, jak pokazano na Rysunku 2.

Na tej podstawie przeprowadzono symulacyjne obliczenie relacji między natężeniami pola magnetycznego w czterech punktach przestrzeni. Dla ułatwienia zbudowano model, jak pokazano na Rysunku 3.

Punkty 1, 2, 3 i 4 są rozłożone ortogonalnie i symetrycznie, z O jako punktem centralnym. Przyjmijmy, że element prądowy porusza się wzdłuż osi OP pośrodkowej osi 2 i 3. Zgodnie z Formułą (1), gdy element prądowy znajduje się w dowolnym punkcie OP, zachodzi B1 = B4 i B2 = B3. W związku z tym należy tylko zbadać zmianę B1/B2 w zależności od ∠θ. Po obliczeniach uzyskano zestaw danych i wygenerowano wykres trendu rozrzutu, jak pokazano w Tabeli 1 i Rysunku 4.

Jak widać na Rysunku 4, trend jest nierównomierną krzywą. Gdy ∠θ wzrasta, B1/B2 spada z 1 do około 0,268 (minimum), a następnie ponownie rośnie do 1. Gdy pola magnetyczne w czterech punktach są równe, element prądowy jest daleko od środka O. W przedziale każda wartość (oprócz minimum) ma dwa punkty – im bliżej minimum, tym punkty są bliżej siebie.
To dotyczy jednego kwadrantu, a to samo dotyczy innych. Opieranie się na natężeniach pola magnetycznego w czterech punktach nie pozwala na ocenę centrowania przewodnika ani określenie jego środka (pole magnetyczne jest wektorem, a nie skalarem).
W związku z tym, aby opracować lepsze urządzenie do pomiaru ekscentryczności, nie należy ślepo podążać za zagranicznymi firmami. Nowa zasada: mierz kąty kierunkowe pola magnetycznego θ₁, θ₂ w punktach P₁/P₂, aby określić środek źródła O (Rysunek 5).

Ta zasada jest geometrycznie podsumowana jako: Trójkąt jest jednoznacznie określony przez jedną stronę i dwa sąsiednie kąty przy niej. Choć to jest prawdziwe, praktyczne wdrożenie wymaga szybkiego i precyzyjnego pomiaru słabych pól magnetycznych.
Przewodniki kablowe indukują prąd około 10 mA w zewnętrznym polu przemiennym. Czujniki, oddalone od kabli, wykrywają słabe pola (~dziesiątki nT) – co wymaga dużej czułości, odpowiedzi częstotliwościowej i niskiego szumu (szum wewnętrzny wpływa na dokładność).
3 Wdrożenie urządzeń do pomiaru ekscentryczności kabla opartych na indukcji elektromagnetycznej
Większość importowanych produktów używa czujników cewkowych; ten artykuł wybiera czujniki magnetooporne. Małe czujniki integrują pomiary elektromagnetyczne i optyczne na tej samej przekroju (minimalizując błędy), z wysoką spójnością między czujnikami. Czujniki magnetooporne oparte na litografii są idealne. W przeciwieństwie do importowanych produktów z czujnikami cewkowymi, które rozdzielają pomiary, traktując segmenty przewodników nieoptyczne jako identyczne – co zwiększa błędy.
Pomiar oparty na magnetooporności: 1000/s pomiarów, powtarzalność ±2% (100–200 nT), ±0,2% dla średniej 1000 pomiarów, liniowość <0,5%. Porównania z importami są ograniczone (brak danych).
Połączenie z szybkim pomiarem optycznym LED×CCD umożliwia pomiar ekscentryczności w czasie rzeczywistym (Rysunek 6).
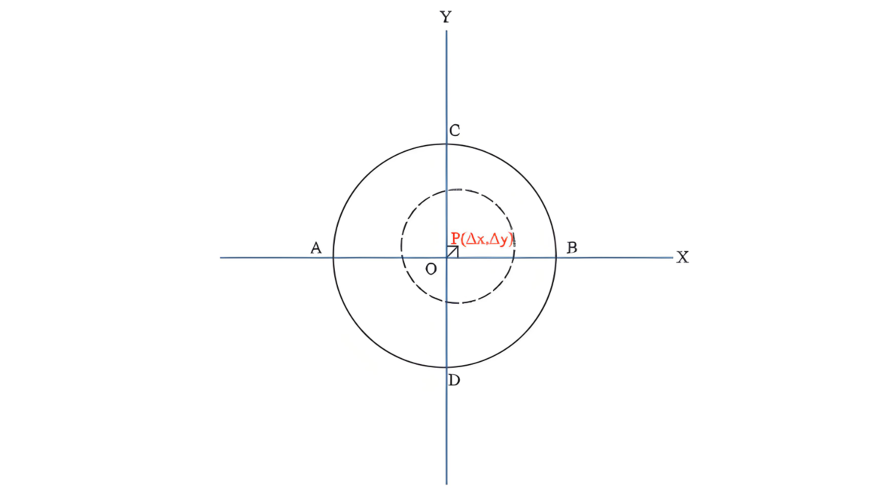
Podczas każdego pomiaru synchronicznie uzyskuje się pozycje czterech punktów (A, B, C, D) na warstwie izolacji oraz pozycję punktu środkowego przewodnika P. Ekscentryczności w kierunkach X i Y oraz całkowita ekscentryczność są obliczane za pomocą następujących wzorów:
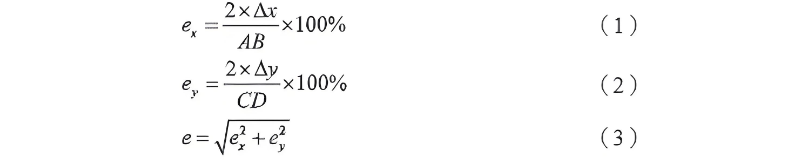
Dla każdego pomiaru ex, ey i e są uśredniane (nad określoną liczbę próbek) jako końcowy wynik ekscentryczności. Aby wyświetlić współśrodkowość, użyj Współśrodkowość = 1 - Ekscentryczność. Δx/Δ y (odchylenia w kierunku X/Y) umożliwiają real-time dostosowania głowicy ekstruderu do automatycznej korekcji ekscentryczności kabla.
Szybsze prędkości pomiarów zmniejszają błędy drżeń: 1000 pomiarów na sekundę osiągają dokładność na poziomie tysięcznych. Większość importowanych produktów (setki pomiarów na sekundę) deklaruje dokładność ekscentryczności zakładając, że przewodnik jest wyśrodkowany (zgodnie z precyzją średnicy zewnętrznej, podaną jako wartości bezwzględne ±μm, a nie procenty – co jest niezgodne).
3.1 Pomiar średnicy LED×CCD
Opiera się na telecentrycznej optyce, wykorzystując zasłanianie światła, aby stworzyć jasne i ciemne obszary CCD. Algorytmy analizują krawędzie, aby obliczyć wymiary. Globalne naświetlenie CCD ( jednoczesne odczytywanie pikseli) powoduje rozmycie krawędzi spowodowane drżeniem (pionowo → pochyłe linie), ale algorytmy rozwiązuja krawędzie i eliminują błędy.
3.2 Uwagi dotyczące pomiaru średnicy optycznej
Nie jest to główny temat, ale kluczowy: Pomiar ekscentryczności kabla wymaga real-time optycznego uchwycenia czterech pozycji wierzchołków warstwy izolacji (a nie tylko wymiarów). Metody skanowania laserowego z użyciem silników mogą prowadzić do błędów pomiarów asynchronicznych. W związku z tym synchronizacja pomiarów optycznych i elektromagnetycznych jest kluczowa dla rozwoju instrumentu.
4 Podsumowanie
Instrument oparty na indukcji elektromagnetycznej szybko mierzy elektryczny środek przewodnika, z niskimi kosztami i przewagami. Rozwiązując wady pomiarów elektromagnetycznych importowanych produktów, opracowano nowoczesny fotoelektromagnetyczny miernik ekscentryczności kabla (dokładność na poziomie tysięcznych). Technologia ewoluuje – przyszłe postępy materiałowe umożliwią wyższą precyzję, napędzając postęp w branży.










