
Kabloların çevrimiçi merkez uzaklığı ölçümündeki temel zorluk, kablo hareketinin yüksek hızıdır. Bu, kablonun titremesini yönetebilen temas olmayan ölçüm ekipmanı gerektirir. Işın geçirme görüntüleme esasına dayanan X-ışını kablo merkez uzaklık ölçerleri, yalıtım merkez uzaklığını hesaplamak için çok katlı kontur boyutlarını ölçer. Ancak, bu tür cihazların bazı dezavantajları vardır: yavaş ölçüm hızı (saniyede birkaç kez), kablonun titremesi nedeniyle artan hatalar ve yüksek maliyetler.
1 Elektromanyetik indüksiyon tabanlı kablo merkez uzaklık ölçerlerin prensipi
Elektromanyetik indüksiyon tabanlı kablo merkez uzaklık ölçerleri, optik çap ölçümünü ve iletken tespiti için elektromanyetik indüksiyonu birleştirir. İletkenin elektriksel merkezini (geometrik merkezden üstün) saniyede binlerce ölçüm hızıyla ölçer. Daha hızlı ölçüm, titreme etkilerini azaltır ve çok katlı boyut gerekliliği olmayan senaryolarda X-ışını cihazlarının yerini alır.
Mevcut ithal ürünler (genel ilkelere göre) dört endüktif bobin kullanarak manyetik alanları tespit eder (Şekil 1'e bakınız). Bazıları eşit sinyal gücüne göre iletken merkezlemeyi belirler (eşit değilse motorlarla pencereyi ayarlar); diğerleri, algılanan sinyal güçlerinden iletken merkezini hesaplar.

2 Ölçüm doğruluğunun kontrolü
Motor ayarı bir süreç içerdiği için, kaçınılmaz olarak gecikme meydana gelir. Bu, yalıtım ve iletken ölçümleri arasındaki zaman uyumsuzluğuna ve gecikme hatalarına yol açar—daha fazla kablo titresimi, daha büyük hatalara neden olur. Pratikte, bu kusur şu şekilde ortaya çıkar: Eğer kablo titremesi olursa, merkez uzaklık ölçüm sonuçları istikrarlı olmaz ve %1'in üzerinde dalgalanır. Bu, ekipman ölçüm hatasıdır, gerçek kablo durumunu yansıtmaz.
Ancak, eşit sinyal gücüne göre iletken merkezlemesini belirlemek her zaman geçerli değildir. Biot-Savart Yasası'na göre: Herhangi bir noktada, mesafesi r olan bir akım elementi Idl tarafından oluşturulan manyetik endüksiyon yoğunluğu B şu şekildedir:

Bu formül, manyetik endüksiyon yoğunluğunun mesafenin karesine ters orantılı olduğunu ve yön açısının sinüsüne orantılı olduğunu gösterir, Şekil 2'de gösterildiği gibi.

Buna dayanarak, uzaydaki dört noktadaki manyetik alan yoğunlukları arasındaki ilişki üzerine bir simülasyon hesaplaması yapılır. Kolaylık olması için, Şekil 3'te gösterildiği gibi bir model oluşturulur.

Noktalar 1, 2, 3 ve 4, O noktasını merkez alarak dik ve simetrik dağılır. Akım elementinin, 2 ve 3 eksenlerinin OP orta çizgisi boyunca hareket etmesi varsayılır. Formül (1)'e göre, akım elementi OP'nin herhangi bir noktasında olduğunda, B1 = B4 ve B2 = B3 koşulları sağlanır. Bu nedenle, yalnızca B1/B2'nin ∠θ ile değişimi incelenmelidir. Hesaplama sonucunda bir veri seti elde edilir ve bir saçılma eğrisi oluşturulur, Tablo 1 ve Şekil 4'e bakınız.

Şekil 4'te görüldüğü gibi, eğilim düzensiz bir eğri şeklindedir. ∠θ arttıkça, B1/B2 1'den yaklaşık 0.268 (minimum) değere düşer, ardından tekrar 1'e yükselir. Dört noktadaki manyetik alanlar eşit olduğunda, akım elementi merkez O noktasından uzaktır. Bu aralıkta, her değer (minimum hariç) iki noktaya sahiptir—minimuma yaklaştıkça, noktalar daha yakınlaşır.
Bu, bir kuadranta uygulanır ve diğerlerinde de aynı geçerlidir. Dört noktadaki manyetik alan büyüklüklerine bağlı kalınarak, iletken merkezlemesi belirlenemez veya merkezi (manyetik alan vektörel, skaler değildir) belirlenemez.
Bu nedenle, daha iyi bir merkez uzaklık ölçer geliştirmek için yabancı firmaları kör takip etmekten kaçınmak gerekir. Yeni prensip: P1/P2'de manyetik alan yön açılarını θ₁, θ₂ ölçerek kaynak merkezi O'yu belirleme (Şekil 5).

Bu prensip, geometrik olarak şöyle özetlenebilir: Bir üçgen, bir kenar ve iki bitişik iç açı ile tek olarak belirlenir. Bu geçerli olsa da, pratik uygulamada zayıf manyetik alanların yüksek hızda ve yüksek doğrulukla ölçülmesi gerekmektedir.
Kablo iletkenleri dışsal alternatif alanlarda yaklaşık 10mA akım indükler. Sensörler, kablolardan bir mesafede, zayıf (~onlarca nT) manyetik alanları tespit eder—yüksek hassasiyet, frekans tepkisi ve düşük gürültüye (öznel gürültü doğruluğu üzerinde etkili) ihtiyaç duyar.
3 Elektromanyetik indüksiyon tabanlı merkez uzaklık ölçerlerin uygulanması
Çoğu ithal ürün, bobin sensörleri kullanır; bu makale manyetorrektif sensörleri seçer. Küçük boyutlu sensörler, aynı kesitte elektromanyetik ve optik ölçümleri entegre eder (hataları en aza indirir) ve sensörler arasında yüksek tutarlılık sağlar. Fotolitografi tabanlı manyetorrektif sensörler idealdir. Karşılaştırıldığında, ithal bobin sensörü ürünler, ölçümleri ayırır, optik olmayan iletken bölümlerini aynı sayar—bu hataları artırır.
Manyetorrektif tabanlı ölçümler: 1000/s ölçümler, ±2% tekrarlanabilirlik (100–200nT), 1000 ölçümlerin ortalaması ±0.2%, doğrusallık <0.5%. İthal ürünlerle karşılaştırmalar sınırlıdır (veri yoktur).
Hızlı LED×CCD optik ölçüm ile birleştirildiğinde, gerçek zamanlı merkez uzaklık ölçümü mümkündür (Şekil 6).
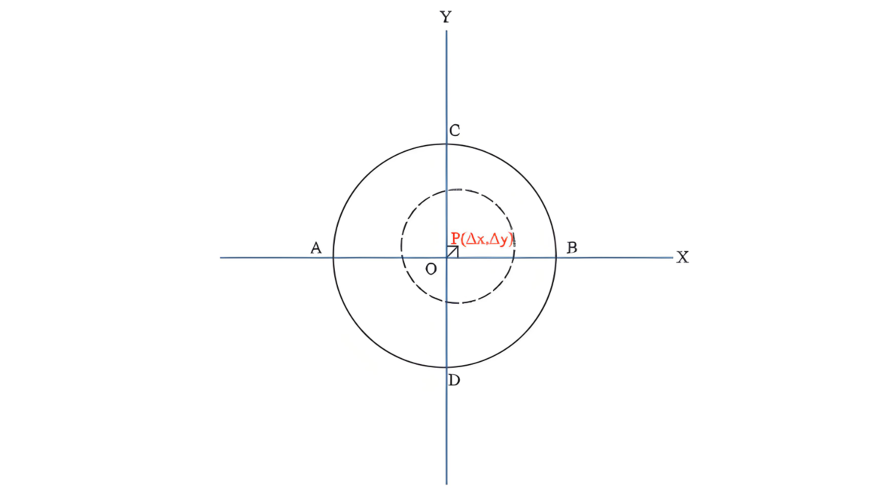
Her ölçüm sırasında, yalıtım tabakasındaki dört noktanın (A, B, C, D) ve iletken merkez noktasının P konumu eş zamanlı olarak elde edilir. X ve Y yönlerindeki ve toplam merkez uzaklıkları aşağıdaki formüllerle hesaplanır:
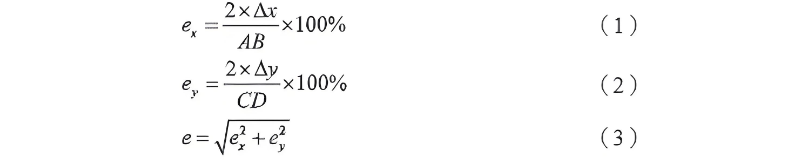
Her ölçümde, ex, ey ve e, (belirli sayıda örnek üzerinden) ortalama alınarak son merkez uzaklık sonucu olarak belirlenir. Merkezlilik gösterimi için, Merkezlilik = 1 - Merkez Uzaklığı kullanılır. Δx / Δy (X/Y yönündeki sapmalar) gerçek zamanlı ekstrüder başlığı ayarlamalarını otomatik kablo merkez uzaklık düzeltmesi için mümkün kılar.
Daha hızlı ölçüm hızları, titreme hatalarını azaltır: 1000/s ölçümler, binde bir doğruluk sağlar. Çoğu ithal ürün (yüzlerce/saniye ölçüm), iletkenin merkezi olduğu varsayımına dayanarak merkez uzaklık doğruluğunu iddia eder (dış çap doğruluğu ile eşleşir, mutlak değer olarak ±μm olarak verilir, yüzde olarak değil—uygun değildir).
3.1 LED×CCD çap ölçümü
Telemerkezi optikler üzerine dayanır, ışık engelleme ile CCD'de parlak-karanlık bölgeler oluşturur. Algoritmalar, kenarları analiz ederek boyutları hesaplar. Genel CCD maruziyeti (aynı anda piksel algılama) titreme nedeniyle kenar bulanıklığına (dikey→çapraz çizgiler) neden olur, ancak algoritmalar kenarları çözler ve hataları ortadan kaldırır.
3.2 Optik çap ölçüm notları
Odak noktası değil, ama kritik: Kablo merkez uzaklık ölçümü, dört yalıtım tabaka köşe pozisyonunun (sadece boyutlar değil) gerçek zamanlı optik yakalama gerektirir. Motorla taranan lazer yöntemleri, zaman uyumsuzluğu nedeniyle hata riskine sahiptir. Bu nedenle, optik ve elektromanyetik ölçümlerin eşzamanlılaştırılması, alet geliştirme için kritiktir.
4 Sonuç
Elektromanyetik indüksiyon tabanlı alet, iletkenin elektriksel merkezini hızlı ve düşük maliyetle ölçer. İthal ürünlerin elektromanyetik ölçüm kusurlarına çözüm getirerek, yeni bir fotoelektromanyetik kablo merkez uzaklık ölçer geliştirilmiştir (binde bir doğruluk). Teknoloji gelişir—gelecekte malzeme ilerlemeleri, daha yüksek doğruluk sağlayacak ve endüstri ilerlemesine katkıda bulunacaktır.










