
Ein zentrales Problem bei der Online-Messung der Kabel-Exzentrizität ist die hohe Geschwindigkeit der Kabelbewegung. Dies erfordert berührungsfreie Messgeräte, die mit Kabelschwingungen umgehen können. Röntgen-Kabelexzentrizitätsmessgeräte, die auf optischer Transmissionsbildgebung basieren, messen mehrschichtige Konturdimensionen, um den geometrischen Mittelpunkt der Leiter in Bezug auf die Isolierungsexzentrizität zu berechnen. Allerdings haben sie Nachteile: eine langsame Messgeschwindigkeit (nur ein paar Mal pro Sekunde), erhöhte Fehler durch Kabelschwingungen und hohe Kosten.
1 Prinzip elektromagnetischer Induktionsbasierte Kabelexzentrizitätsmessgeräte
Elektromagnetische Induktionsbasierte Kabelexzentrizitätsmessgeräte kombinieren optische Durchmessermessung und elektromagnetische Induktion zur Leitererkennung. Sie messen das elektrische Zentrum des Leiters (überlegen zur geometrischen Exzentrizität) mit einer hohen Geschwindigkeit von Tausenden von Messungen pro Sekunde. Eine schnellere Messung reduziert die Auswirkungen von Schwingungen und ersetzt Röntgengeräte in Szenarien ohne Anforderungen an mehrschichtige Dimensionen.
Aktuelle importierte Produkte (gemäß öffentlich bekannten Prinzipien) verwenden vier induktive Spulen, um Magnetfelder zu erkennen (siehe Abbildung 1). Einige bestimmen die Zentrierung des Leiters über gleichmäßige Signalstärke (justieren das Fenster mit Motoren, wenn ungleich); andere berechnen das Leiterzentrum aus der erkannten Signalstärke.

2 Steuerung der Messgenauigkeit
Die Motoranpassung beinhaltet einen Prozess, der unvermeidlich Verzögerungen verursacht. Dies führt zu einer Desynchronisation zwischen der Isolierungs- und Leitermessung, was Verzögerungsfehler verursacht - bei stärkeren Kabelschwingungen sind diese Fehler größer. In der Praxis zeigt sich dieser Mangel so: Wenn Kabelschwingungen auftreten, werden die Ergebnisse der Exzentrizitätsmessung instabil, mit Schwankungen, die 1% überschreiten. Dies spiegelt den Messfehler des Geräts wider, nicht den tatsächlichen Zustand des Kabels.
Allerdings ist es nicht immer gültig, die Zentrierung des Leiters anhand gleicher Signalstärken zu beurteilen. Das Biot-Savart-Gesetz besagt: Die magnetische Induktion (B), die durch ein Stromelement Idl an einem beliebigen Punkt im Raum in Abstand r erzeugt wird, lautet:

Diese Formel zeigt, dass die magnetische Induktion umgekehrt proportional zum Quadrat des Abstands und proportional zum Sinus des Richtungswinkels θ ist, wie in Abbildung 2 dargestellt.

Basierend darauf wird eine Simulationsberechnung der Beziehung zwischen den magnetischen Feldstärken an vier Punkten im Raum durchgeführt. Für die Einfachheit wird ein Modell wie in Abbildung 3 erstellt.

Punkte 1, 2, 3 und 4 sind orthogonal und symmetrisch verteilt, mit O als dem Zentrum. Lassen Sie das Stromelement entlang der Mittellinie OP der Achsen 2 und 3 bewegen. Gemäß Formel (1) gilt, wenn das Stromelement an jedem Punkt auf OP liegt, B1 = B4 und B2 = B3. Daher muss nur die Variation von B1/B2 mit ∠θ untersucht werden. Nach der Berechnung wird ein Datensatz erhalten und ein Streutrenddiagramm generiert, wie in Tabelle 1 und Abbildung 4 gezeigt.

Wie in Abbildung 4 zu sehen, ist der Trend eine unregelmäßige Kurve. Mit zunehmendem ∠θ fällt B1/B2 von 1 auf etwa 0,268 (Minimum) und steigt dann wieder auf 1. Während die Magnetfelder an vier Punkten gleichmäßig sind, ist das Stromelement weit vom Zentrum O entfernt. Im Intervall hat jeder Wert (außer Minimum) zwei Punkte - je näher am Minimum, desto näher liegen die Punkte zusammen.
Dies gilt für ein Quadrant, und das Gleiche gilt für die anderen. Die Erkennung der Zentrierung des Leiters oder die Bestimmung seines Zentrums (Magnetfeld ist ein Vektor, kein Skalar) kann nicht allein durch die Größen der Magnetfelder an vier Punkten erfolgen.
Daher sollte man, um ein besseres Exzentrizitätsmessgerät zu entwickeln, nicht blindlings ausländischen Firmen folgen. Ein neues Prinzip: Messen Sie die Richtungswinkel θ₁, θ₂ an P₁/P₂, um das Quellenzentrum O (Abbildung 5) zu bestimmen.

Dieses Prinzip wird geometrisch zusammengefasst als: Ein Dreieck ist eindeutig bestimmt durch eine Seite und zwei angrenzende Winkel. Während dies zutrifft, erfordert die praktische Umsetzung die hochgenaue und schnelle Messung schwacher Magnetfelder.
Kabelleiter induzieren in externen Wechselfeldern etwa 10mA Strom. Sensoren, die von den Kabeln entfernt sind, detektieren schwache (~Dutzende nT) Felder - was hohe Empfindlichkeit, Frequenzantwort und geringes Rauschen (intrinsisches Rauschen beeinflusst die Genauigkeit) erfordert.
3 Umsetzung elektromagnetischer Induktionsbasierte Exzentrizitätsmessgeräte
Die meisten importierten Produkte verwenden Spulensensoren; dieser Artikel wählt magnetoresistive Sensoren. Kleine Sensoren integrieren elektromagnetische/optische Messungen auf der gleichen Querschnittsebene (um Fehler zu minimieren), mit hoher Konsistenz zwischen den Sensoren. Lithographie-basierte magnetoresistive Sensoren sind ideal. Im Gegensatz dazu trennen importierte Spulensensorprodukte die Messungen, behandeln nicht-optische Leiterabschnitte als identisch - was die Fehler erhöht.
Magnetoresistiv-basierte Messungen: 1000/s Messungen, ±2% Wiederholbarkeit (100-200nT), ±0,2% für 1000-Messdurchschnitt, Linearität <0,5%. Vergleiche mit Importen sind begrenzt (keine Daten).
Die Kombination mit schneller LED×CCD-optischer Messung ermöglicht die Echtzeit-Exzentrizitätsmessung (Abbildung 6).
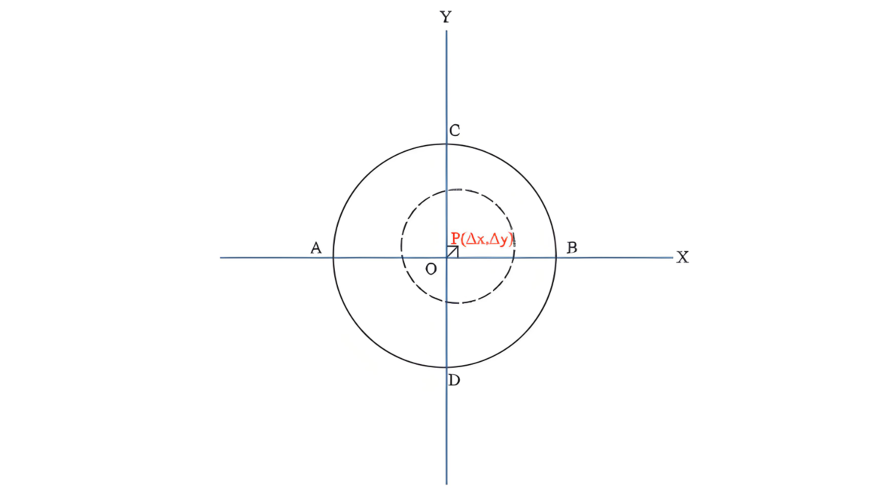
Während jeder Messung werden die Positionen von vier Punkten (A, B, C, D) auf der Isolierschicht und die Position des Leitermittelpunktes P synchron erfasst. Die Exzentrizitäten in X- und Y-Richtung und die Gesamtexzentrizität werden mit den folgenden Formeln berechnet:
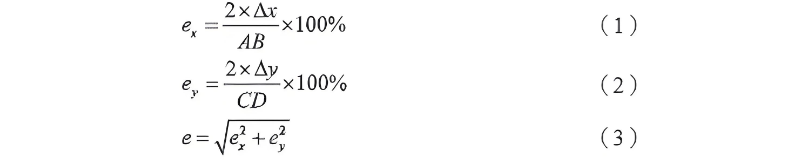
Für jede Messung werden ex, ey und e (über eine bestimmte Anzahl von Proben) gemittelt, als endgültiges Exzentrizitätsresultat. Um die Konzentrizität anzuzeigen, verwenden Sie Konzentrizität = 1 - Exzentrizität. Δx/Δy (Abweichungen in X-/Y-Richtung) ermöglichen Echtzeit-Anpassungen des Extruderkopfes für automatische Korrektur der Kabel-Exzentrizität.
Schnellere Messgeschwindigkeiten reduzieren Schwingungsfehler: 1000 Messungen pro Sekunde erreichen tausendstel-Genauigkeit. Die meisten importierten Produkte (hunderte Messungen pro Sekunde) behaupten Exzentrizitätsgenauigkeit unter der Annahme eines zentrierten Leiters (entspricht der Außendurchmessergenauigkeit, angegeben als ±μm absolute Werte, nicht Prozent - nicht konform).
3.1 LED×CCD-Durchmessermessung
Basierend auf telezentrischer Optik verwendet es Lichtblockierung, um helle-dunkle CCD-Bereiche zu erzeugen. Algorithmen analysieren die Kanten, um Dimensionen zu berechnen. Globale CCD-Exposition (gleichzeitige Pixelwahrnehmung) führt zu Schwingungsbedingter Kantenverschwommenheit (vertikal → schräg), aber Algorithmen lösen die Kanten auf und eliminieren Fehler.
3.2 Hinweise zur optischen Durchmessermessung
Nicht der Fokus, aber wichtig: Die Messung der Kabel-Exzentrizität erfordert die Echtzeitoptische Erfassung der Positionen der vier Scheitelpunkte der Isolierschicht (nicht nur Dimensionen). Motor-gescannte Lasermethoden riskieren asynchrone Messfehler. Daher ist die Synchronisierung der optischen und elektromagnetischen Messungen entscheidend für die Entwicklung des Instruments.
4 Schlussfolgerung
Das elektromagnetische Induktionsbasierte Gerät misst schnell das elektrische Zentrum des Leiters, mit niedrigeren Kosten und Vorteilen. Es behebt die Mängel der elektromagnetischen Messungen der importierten Produkte und entwickelt ein neues fotoelektromagnetisches Kabelexzentrizitätsmessgerät (tausendstel-Genauigkeit). Technologie entwickelt sich weiter - zukünftige Materialfortschritte werden höhere Präzision ermöglichen und die Industrie vorantreiben.










