
ऑनलाइन केबल विकेन्द्रता मापनको एक प्रमुख चुनौती हो केबलको उच्च-गति गतिले हो। यसले टक्कर रहेको केबलको खप्पटलाई सामना गर्न सक्ने संपर्क-रहित मापन उपकरणको आवश्यकता जनाउँछ। एक्स-रे आधारित केबल विकेन्द्रता मापक, प्रकाश प्रसारण छवि आधारित छ, यसले बहु-तह रेखांकन आयाम माप्ने र अवरोधक विकेन्द्रता सापेक्ष चालक ज्यामितिक केन्द्र गणना गर्दछ। तर, यसको दोषहरू छन्: धीरे मापन गति (सेकेन्डमा केवल केही बार), केबल खप्पटबाट वृद्धित त्रुटि, र उच्च लागत।
1 विद्युत-चुम्बकीय प्रेरण आधारित केबल विकेन्द्रता मापकको सिद्धान्त
विद्युत-चुम्बकीय प्रेरण आधारित केबल विकेन्द्रता मापकले ऑप्टिकल व्यास मापन र चालक निर्णयक विद्युत-चुम्बकीय प्रेरणलाई संयोजित गर्दछ। यसले चालकको विद्युत केन्द्र (ज्यामितिक विकेन्द्रता भन्दा उत्कृष्ट) माप्छ, र सेकेन्डमा हजारो बारको उच्च गतिले। तीव्र मापन खप्पटको प्रभावलाई घटाउँछ, र बहु-तह आयाम आवश्यकता बिनाको परिस्थितिमा एक्स-रे उपकरणलाई प्रतिस्थापन गर्दछ।
वर्तमान आयातित उत्पाद (सार्वजनिक सिद्धान्त अनुसार) चार चुम्बकीय कुण्डीहरूले चुम्बकीय क्षेत्र निर्णय गर्दछ (फिगर 1 जस्तो)। केही बराबर सिग्नल शक्ति द्वारा चालक केन्द्र निर्धारण गर्छ (असमान भएको अवस्थामा मोटर द्वारा विन्डो समायोजन); अन्य बाट निर्णयित सिग्नल शक्तिद्वारा चालक केन्द्र गणना गर्दछ।

2 मापन परिशुद्धता नियन्त्रण
मोटर समायोजन एक प्रक्रिया छ, यसले अनिवार्य रूपमा देरी उत्पन्न गर्छ। यसले अवरोधक र चालक मापन बीच असंगति उत्पन्न गर्छ, यसले देरी त्रुटिहरू उत्पन्न गर्छ—अधिक गम्भीर केबल खप्पट अधिक ठूलो त्रुटिहरू उत्पन्न गर्छ। व्यावहारिक रूपमा, यो दोष प्रकट हुन्छ: यदि केबल खप्पट घट्ने छ, भने विकेन्द्रता मापन परिणाम अस्थिर हुन्छ, र त्यसले 1% भन्दा बढी झुकाव देखाउँछ। यो उपकरणको मापन त्रुटिलाई प्रतिफलित गर्छ, वास्तविक केबलको स्थिति भन्दा।
तर, बराबर सिग्नल शक्ति द्वारा चालक केन्द्र निर्धारण गर्ने सिद्धान्त सधैं वैध छैन। बिओट-सावार्टको नियम लेख्दछ: कुनै बिन्दुमा दूरी r वटा विद्युत तत्व Idl द्वारा प्रेरित चुम्बकीय प्रेरण तीव्रता (B) छ:

यो सूत्र देखाउँछ कि चुम्बकीय प्रेरण तीव्रता दूरीको वर्ग विपरीत अनुपातिक र दिशा कोण θ को साइन अनुपातिक छ, जस्तो फिगर 2 मा देखाइएको छ।

यसको आधारमा, चार बिन्दुहरूमा चुम्बकीय क्षेत्र तीव्रताहरूको सम्बन्धको सिमुलेशन गणना गरिएको छ। सुविधाका लागि, फिगर 3 जस्तो मॉडल बनाइएको छ।

बिन्दुहरू 1, 2, 3, र 4 ले O को केन्द्रमा लम्ब र सममित वितरण छन्। चालक तत्वले अक्ष 2 र 3 को मध्य रेखा OP मा चल्ने अनुमति दिनुहोस्। सूत्र (1) अनुसार, जब चालक तत्व OP मा कुनै बिन्दुमा छ, तब B1 = B4 र B2 = B3 छ। त्यसैले, केवल B1/B2 को ∠θ साथ परिवर्तन जाँच गर्नुपर्छ। गणना पछि, डाटा सेट प्राप्त गरिएको छ, र त्यसले फिगर 4 जस्तो डिस्पर्सन ट्रेन्ड चित्र उत्पन्न गर्छ।

फिगर 4 मा देखिन्छ, ट्रेन्ड एक अनियमित वक्र हो। ∠θ बढ्दा, B1/B2 1 बाट ~0.268 (न्यूनतम) सम्म गिर्दै, त्यसपछि फेरि 1 सम्म उठ्दै जान्छ। चार बिन्दुहरूमा चुम्बकीय क्षेत्र बराबर छ भने, चालक तत्व दूरी O सँग दूर छ। अन्तरालमा, प्रत्येक मान (न्यूनतम बाहिर) दुई बिन्दुहरूको छ—न्यूनतम नजिक, बिन्दुहरू नजिक छन्।
यो एक चतुर्थांशका लागि लागू हुन्छ, र अन्यहरूमा पनि यस्तो छ। चार बिन्दुहरूको चुम्बकीय क्षेत्र तीव्रताले चालक केन्द्र निर्धारण गर्न वा त्यसको केन्द्र निर्धारण गर्न सकिँदैन (चुम्बकीय क्षेत्र एक सदिश हो, अदिश छैन)।
त्यसैले, एउटा राम्रो विकेन्द्रता मापक विकसित गर्न, बाहिरका कम्पनीहरूको अनुसरण गर्न बिना रहनुपर्छ। नयाँ सिद्धान्त: P₁/P₂ मा चुम्बकीय क्षेत्र दिशा कोण θ₁, θ₂ माप गरेर स्रोत केन्द्र O निर्धारण गर्नु (फिगर 5)।

यो सिद्धान्त ज्यामितिक रूपमा सारांशित गरिएको छ: एक त्रिकोण एक भुजा र दुई आसन्न समावेशी कोण द्वारा अनन्य रूपमा निर्धारित हुन्छ। यो लागू हुन्छ, तर व्यावहारिक लागू गर्न दुर्बल चुम्बकीय क्षेत्रको उच्च-गति, उच्च-परिशुद्धता मापन आवश्यक छ।
केबल चालकहरू बाहिरी विकल्पी क्षेत्रमा ~10mA विद्युत धारा प्रेरण गर्छन्। सेन्सरहरू, केबल बाट दूर, दुर्बल (~दही नT) क्षेत्र लाई निर्णय गर्दछन्—उच्च संवेदनशीलता, आवृत्ति प्रतिक्रिया, र निम्न शोर (आन्तरिक शोर परिशुद्धता प्रभावित गर्छ)।
3 विद्युत-चुम्बकीय प्रेरण आधारित विकेन्द्रता मापकको लागू
धेरै आयातित उत्पादहरू कुण्डी सेन्सर प्रयोग गर्छन्; यो लेख चुम्बकीय प्रतिरोध सेन्सर चयन गर्छ। लघु सेन्सरहरूले एकै छेदमा विद्युत-चुम्बकीय/ऑप्टिकल मापन सम्मिलित गर्दछ (त्रुटिलाई न्यूनतम गर्दछ), र उच्च सेन्सर बीच सुसंगतता। लिथोग्राफी आधारित चुम्बकीय प्रतिरोध सेन्सर आदर्श छन्। तुलनामा, आयातित कुण्डी-सेन्सर उत्पादहरू मापन विभाजित गर्छ, र गैर-ऑप्टिकल चालक खण्डलाई समान मान्छन्—त्रुटिलाई बढाउँछ।
चुम्बकीय प्रतिरोध आधारित मापन: 1000/सेकेन्ड मापन, ±2% पुनरावृत्ति (100-200nT), 1000-मापन औसत ±0.2%, रेखिकता <0.5%। आयातित साथ तुलना सीमित (डाटा छैन)।
त्वरित LED×CCD ऑप्टिकल मापन साथ वास्तविक समयमा विकेन्द्रता मापन संभव (फिगर 6)।
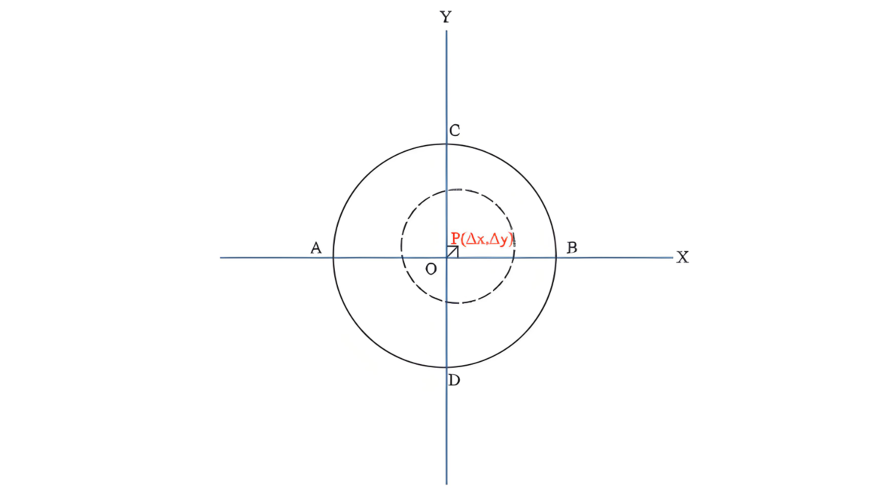
प्रत्येक मापनमा, अवरोधक तहको चार बिन्दुहरू (A, B, C, D) र चालक केन्द्र बिन्दु P को स्थितिलाई संगत रूपमा प्राप्त गरिन्छ। X र Y दिशामा विकेन्द्रता र कुल विकेन्द्रता निम्न सूत्र द्वारा गणना गरिन्छ:
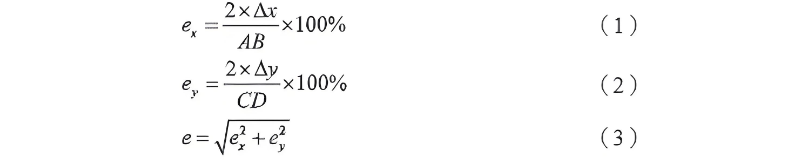
प्रत्येक मापनका लागि, ex, ey, र e (नमूनाको निर्धारित संख्या) औसत लिइएको छ र अन्तिम विकेन्द्रता परिणाम रूपमा। केन्द्रीयता देखाउन, केन्द्रीयता = 1 - विकेन्द्रता प्रयोग गर्नुहोस्। Δx/Δ y (X/Y-दिशामा विचलन) वास्तविक समयमा एक्सट्रूडर हेड समायोजन गर्न र ऑटोमेटिक केबल विकेन्द्रता सुधार गर्न सकिन्छ।
तीव्र मापन गतिले खप्पट त्रुटिहरूलाई घटाउँछ: 1000 मापन/सेकेन्ड छ हजारवटा स्थानको परिशुद्धता प्राप्त गर्छ। धेरै आयातित उत्पादहरू (सेकेन्डमा सैकडाहरू मापन) केन्द्रित चालक भन्दा विकेन्द्रता परिशुद्धता दावा गर्छ (बाहिरी व्यास परिशुद्धता, ±μm निरपेक्ष मान, प्रतिशत छैन—अनुपालन गरिँदैन)।
3.1 LED×CCD व्यास मापन
यो टेलेसेन्ट्रिक ऑप्टिक्स आधारित छ, यसले प्रकाश रोध द्वारा CCD रेखाहरूमा उज्यालो-अँधेरो क्षेत्र उत्पन्न गर्छ। एल्गोरिथमहरूले किनाराहरू विश्लेषण गर्दछन् र आयाम गणना गर्दछ। विश्वव्यापी CCD प्रकाश (एकसाथ पिक्सेल सेन्सिंग) खप्पट-प्रेरित किनारा डिम गर्छ (लम्बवत → तिरछा रेखाहरू), तर एल्गोरिथमहरू किनारा समाधान गर्दछन् र त्रुटिहरू उत्पन्न गर्दछन्।
3.2 ऑप्टिकल व्यास मापन नोट
यो फोकस छैन, तर महत्वपूर्ण: केबल विकेन्द्रता मापन चाहिँचे वास्तविक समयमा चार अवरोधक तहको शीर्ष बिन्दुहरूको ऑप्टिकल पकड (केवल आयाम भन्दा)। मोटर-स्कैन लेजर विधिहरू असंगत-मापन त्रुटिहरूको जोखिम छन्। त्यसैले, ऑप्टिकल र विद्युत-चुम्बकीय मापन संगत गर्न यस उपकरणको विकास अत्यन्त महत्वपूर्ण छ।
4 निष्कर्ष
विद्युत-चुम्बकीय प्रेरण आधारित यन्त्र चालकको विद्युत केन्द्र तीव्र गतिले माप्छ, निम्न लागत र लाभ। आयातित उत्पादहरूको विद्युत-चुम्बकीय मापनको दोषहरूको समाधान गर्द, नयाँ फोटोइलेक्ट्रोमैग्नेटिक केबल विकेन्द्रता मापक विकसित गरिएको छ (हजारवटा स्थानको परिशुद्धता)। प्रौद्योगिकी प्रगतिले—भविष्यका सामग्री प्रगतिले उच्च परिशुद्धता सम्भव बनाउनेछ, र उद्योग प्रगति गर्नेछ।










