
Jedan od ključnih izazova u mernim sistemima za ekscentričnost kabela u online režimu jeste visoka brzina kretanja kabela. To zahteva merno opremu bez kontaktne mere koja može da se suoči sa treperenjem kabela. Rentgenski ekscencimeteri, bazirani na optičkoj transmisioni, merenjem kontura višestrukih slojeva određuju geometrijski centar vodilaca u odnosu na ekscentričnost izolacije. Međutim, oni imaju mane: sporu brzinu merenja (samo nekoliko puta po sekundi), povećane greške usled treperenja kabela i visoku cenu.
1 Princip elektromagnetskih indukcija - baziranih ekscencimetara
Ekscencimetri bazirani na elektromagnetskim indukcijama kombinuju optičku prečnu meru i elektromagnetsku indukciju za detekciju vodilaca. Oni merenjem električnog centra vodilaca (superiornog u odnosu na geometrijsku ekscentričnost) dostižu visoku brzinu od hiljadu merenja po sekundi. Brza merenja smanjuju uticaj treperenja, zamenjujući rentgenska uređaja u scenarijima gde nema potrebe za merenjem dimenzija više slojeva.
Trenutni uvoženi proizvodi (prema javnim principima) koriste četiri induktivna čevlja za detekciju magnetskih polja (kao što je prikazano na Slici 1). Neki određuju centriranje vodilaca preko jednake snage signala (prilagođavajući prozor motorima ako nije jednak); drugi računaju centar vodilaca iz detektovane snage signala.

2 Kontrola preciznosti merenja
Prilagođavanje motora podrazumeva proces, koji neizbežno dovodi do kašnjenja. To dovodi do dezinhronizacije između merenja izolacije i vodilaca, stvarajući greške kašnjenja - veće treperenje kabela dovodi do većih grešaka. U praksi, ova nedostataka se manifestuje: ukoliko dođe do treperenja kabela, rezultati merenja ekscentričnosti postaju nestabilni, sa fluktuacijama koje prelaze 1%. Ovo odražava grešku mernog uređaja, a ne stvarno stanje kabela.
Međutim, procena centriranja vodilaca preko jednake snage signala nije uvek validna. Biot-Savartov zakon navodi: magnetska indukcija (B) izazvana elementom struje Idl u bilo kojoj tački prostora na rastojanju r je:

Ova formula pokazuje da je magnetska indukcija obrnuto proporcionalna kvadratu rastojanja i proporcionalna sinusu ugla smjera θ, kao što je prikazano na Slici 2.

Na osnovu toga, vrši se simulacija izračunavanja odnosa intenziteta magnetskog polja na četiri tačke u prostoru. Za lakši pregled, postavljen je model kako je prikazano na Slici 3.

Tačke 1, 2, 3 i 4 su ortogonalno i simetrično raspoređene, sa O kao centrom. Pretpostavimo da se element struje kreće duž srednje linije OP osi 2 i 3. Prema Formuli (1), kada se element struje nalazi na bilo kojoj tački na OP, B1 = B4 i B2 = B3 važe. Stoga, potrebno je ispitati samo promenu B1/B2 sa ∠θ. Nakon izračunavanja, dobijena je skupina podataka, a generisan je grafik rasipanja, kao što je prikazano u Tabeli 1 i Slici 4.

Kao što se može vidjeti na Slici 4, trend predstavlja nepravilan krug. Kako ∠θ raste, B1/B2 pada sa 1 do ~0.268 (min), zatim ponovo raste do 1. Dok su magnetska polja na četiri tačke ista, element struje je daleko od centra O. U intervalu, svaki iznos (osim min) ima dvije tačke - bliže su minimumu, tačke su bliže međusobno.
Ovo se odnosi na jedan kvadrant, a isto važi i za ostale. Zavisno od magnituda magnetskog polja na četiri tačke, ne može se odrediti centriranje vodilaca ili njegov centar (magnetsko polje je vektorska, a ne skalarna veličina).
Stoga, kako bi se razvio bolji ekscencimeter, ne treba slepo pratiti inostrane firme. Novi princip: merenje uglova smjera magnetskog polja θ₁, θ₂ na P₁/P₂ za određivanje centra izvora O (Slika 5).

Ovaj princip se geometrijski može sažeti kao: Trokut je jedinstveno određen jednom stranicom i dva susjedna unutrašnja kuta. Dok to vrijedi, praktična implementacija zahtijeva brzo i precizno merenje slabi magnetskih polja.
Vodilci kabela indukuju oko 10mA struje u vanjskim alternativnim poljima. Senzori, udaljeni od kabela, detektuju slaba (~desetici nT) polja - zahtijevaju visoku osjetljivost, frekvencijsku odgovornost i niski šum (prirodni šum utiče na preciznost).
3 Implementacija elektromagnetskih indukcija - baziranih ekscencimetara
Većina uvoženih proizvoda koristi senzore čevlja; ovaj rad birа senzore magnetoresistivnosti. Mali senzori integrišu elektromagnetska i optička merenja na istom presjeku (minimaliziraju greške), sa visokom konzistentnošću između senzora. Fotolitografski bazirani senzori magnetoresistivnosti su idealni. U suprotnosti, uvoženi proizvodi sa čevljačkim senzorima razdvajaju merenja, trateći neoptičke segmente vodilaca kao identične - povećavaju greške.
Merenja temeljena na magnetoresistivnosti: 1000/s merenja, ±2% ponovljivost (100-200nT), ±0.2% za prosečne 1000 merenja, linearnost <0.5%. Usponi sa uvoznim proizvodima su ograničeni (nema podataka).
Kombinacija s brzim LED×CCD optičkim merenjima omogućuje stvarno-vrijeme merenje ekscentričnosti (Slika 6).
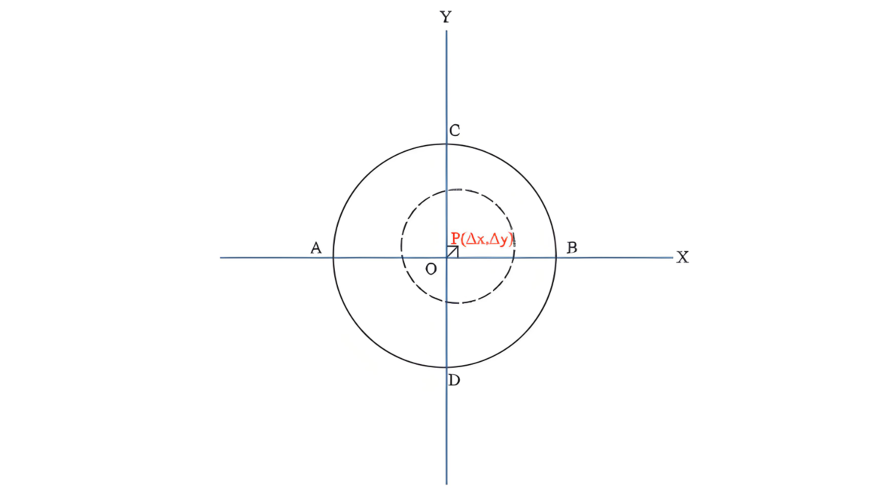
Tokom svakog merenja, pozicije četiri tačke (A, B, C, D) na sloju izolacije i pozicija centra vodilca P su sinkrono dobiveni. Ekscentričnosti u X i Y smjeru i ukupna ekscentričnost se računaju koristeći sljedeće formule:
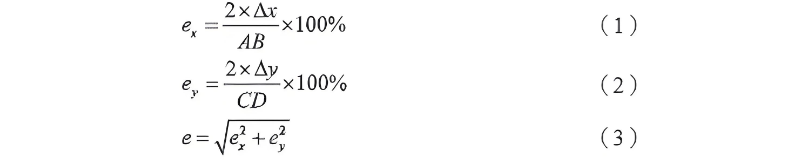
Za svako merenje, ex, ey i e su prosječeni (nad određenim brojem uzoraka) kao konačni rezultat ekscentričnosti. Za prikaz koncentricnosti, koristi se Koncentricnost = 1 - Ekscentričnost. Δx/Δy (odstupanja u X/Y smjeru) omogućuju stvarno-vrijeme podešavanja glave ekstrudera za automatsko korekciranje ekscentričnosti kabela.
Brža brzina merenja smanjuje greške uslijed treperenja: 1000 merenja/sekundu dostižu preciznost na tisućinku. Većina uvoženih proizvoda (stotine merenja/sekundu) tvrdi preciznost ekscentričnosti pretpostavljajući centriran vodilac (podudaranje s preciznošću spoljnog prečnika, datim kao ±μm apsolutne vrijednosti, a ne procenti - neusklađeno).
3.1 Merenje prečnika LED×CCD
Temelji se na telecentričnoj optici, koristeći blokiranje svjetlosti za stvaranje svijetlih-tamnih regiona CCD. Algoritmi analiziraju rubove za izračunavanje dimenzija. Globalna CCD ekspozicija (istovremeno čuvanje piksela) dovodi do zamagljenja rubova uslijed treperenja (vertikalno->skoso), ali algoritmi rješavaju rubove i eliminiraju greške.
3.2 Napomene o optičkom merenju prečnika
Nije fokus, ali ključno: Mereći ekscentričnost kabela, potrebno je stvarno-vrijeme optičko hvatanje četiri pozicije vrha sloja izolacije (a ne samo dimenzije). Metode sa laserskim skeniranjem motorima rizikuju asinhronim greškama merenja. Stoga, sinkronizacija optičkih i elektromagnetskih merenja je ključna za razvoj instrumenta.
4 Zaključak
Elektromagnetski indukcija - bazirani instrument brzo meri električni centar vodilaca, s niskom cenom i prednostima. Rješavajući mane elektromagnetskih merenja uvoženih proizvoda, razvijen je novi fotoelektromagnetski ekscencimeter (preciznost na tisućinku). Tehnologija se razvija - buduće napredne materijale omogućit će još veću preciznost, pogonjući napredak industrije.










