
En kerneudefordring ved online måling af kabels ekscentricitet er kablens højhastighedsbevægelse. Dette kræver ikke-kontaktmåleudstyr, der kan håndtere kabeljitter. Røntgenbaserede kabelekscentrimetrere, baseret på optisk transmissionsskanning, måler flerlagede konturdimensioner for at beregne ledningers geometriske centrum i forhold til isolations ekscentricitet. Dog har de nogle ulemper: langsom måling (kun få gange pr. sekund), øget fejlmargin fra kabeljitter og høje omkostninger.
1 Princippet bag elektromagnetisk induktion-baserede kabelekscentrimetrere
Elektromagnetisk induktion-baserede kabelekscentrimetrere kombinerer optisk diametermåling og elektromagnetisk induktion til ledningsdetektion. De måler ledningens elektriske centrum (bedre end geometrisk ekscentricitet) med en høj hastighed på tusinder af målinger pr. sekund. En hurtigere måling reducerer jittereffekter, hvilket erstatter røntgenenheder i scenarier uden behov for flerlagede dimensioner.
Nuværende importerede produkter (ifølge offentlige principper) bruger fire induktive spoler til detektion af magnetfelter (se figur 1). Nogle bestemmer ledningens centrum via lige signalstyrke (justerer vinduet med motorer, hvis ulige); andre beregner ledningens centrum ud fra detekteret signalstyrke.

2 Kontrol af målnøjagtighed
Motorjustering involverer en proces, som uundgåeligt skaber forsinkelse. Dette fører til asynkronisme mellem isolations- og ledningsmålinger, hvilket skaber forsinkelsesfejl – mere alvorlig kabeljitter resulterer i større fejl. I praksis viser denne fejl sig: hvis kabeljitter opstår, bliver ekscentricitetsmålingsresultater ustabile, med fluktuationer, der overstiger 1%. Dette afspejler udstyrs målingsfejl, ikke den faktiske kablets tilstand.
Men at vurdere ledningens centrum via lige signalstyrke er ikke altid gyldigt. Biot-Savarts lov siger: magnetinduktionens styrke (B) opwekket af et strømelement Idl i ethvert punkt i rummet ved afstand r er:

Denne formel indikerer, at magnetinduktionens styrke er omvendt proportional med kvadratet af afstanden og proportional med sinus af retningsvinklen θ, som vist på figur 2.

På baggrund heraf udføres en simuleret beregning af forholdet mellem magnetfeltintensiteterne i fire punkter i rummet. For bekvemmelighedens skyld oprettes en model som vist på figur 3.

Punkter 1, 2, 3 og 4 er ortogonalt og symmetrisk fordelt, med O som midtpunkt. Lad strømelementet bevæge sig langs aksernes midte OP. Ifølge formel (1) gælder, når strømelementet er på ethvert punkt på OP, at B1 = B4 og B2 = B3. Derfor skal kun variationen af B1/B2 med ∠θ undersøges. Efter beregningen opnås en række data, og en scatter-trendgraf genereres, som vist i tabel 1 og figur 4.

Som ses på figur 4, er trenden en uregelmæssig kurve. Når ∠θ stiger, falder B1/B2 fra 1 til ~0,268 (minimum), og stiger derefter tilbage til 1. Mens magnetfelterne i fire punkter er lige, er strømelementet langt fra midtpunktet O. I intervallet har hver værdi (med undtagelse af minimum) to punkter – nærmere minimum, er punkter tættere på hinanden.
Dette gælder for en kvadrant, og det samme gælder for de andre. At stole på firepunkters magnetfeltmagnitude kan ikke dømme ledningens centrum eller fastslå dens centrum (magnetfelt er en vektor, ikke en skalar).
Derfor, for at udvikle en bedre ekscentrimeter, undgå blindt at følge udenlandske virksomheder. Et nyt princip: mål magnetfeltets retningsvinkler θ₁, θ₂ på P₁/P₂ for at fastslå kildecentrum O (figur 5).

Dette princip er geometrisk summeret som: En trekant er entydigt defineret af en side og to nabohjørnevinkler. Selvom dette gælder, kræver praktisk implementering højhastighed, højpræcisionsmåling af svage magnetfelter.
Kabelledninger inducerer ~10mA strøm i eksterne alternerende felter. Sensorer, placeret fra kabler, detekterer svage (~tiere nT) felter – kræver høj sensitivitet, frekvensrespons og lav støj (inherent støj påvirker nøjagtigheden).
3 Implementering af elektromagnetisk induktion-baserede ekscentrimetrere
De fleste importerede produkter bruger spoilsensorer; dette arbejde vælger magnetoresistive sensorer. Små sensorer integrerer elektromagnetiske/optiske målinger på samme tværsnit (minimerer fejl), med høj konsekvens mellem sensorer. Lithografibaserede magnetoresistive sensorer er ideelle. Imidlertid adskiller importerede spillersensorprodukter målinger, behandler ikke-optiske ledningssegmenter som identiske – øger fejl.
Magnetoresistive-baserede målinger: 1000/s målinger, ±2% gentagelighed (100–200nT), ±0,2% for 1000-målingsgennemsnit, lineærhed <0,5%. Sammenligninger med importerede er begrænsede (ingen data).
Kombination med hurtig LED×CCD optisk måling muliggør realtid ekscentritetsmåling (figur 6).
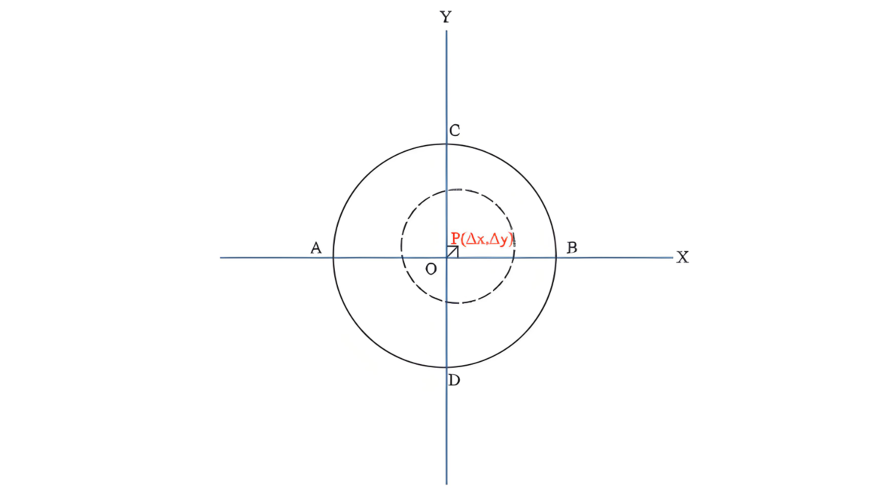
Under hver måling erhverves positionerne af fire punkter (A, B, C, D) på isolationslaget og positionen af ledningens centrum P synkront. Ekscentriciteten i X- og Y-retninger og den totale ekscentricitet beregnes ved hjælp af følgende formler:
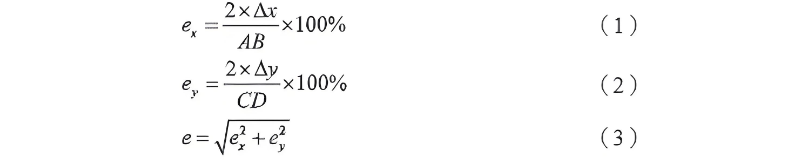
For hver måling gennemsnittes ex, ey, og e (over et sæt antal prøver) som det endelige ekscentricitetsresultat. For at vise koncentricitet, brug Koncentricitet = 1 - Ekscentricitet. Δx/Δ y (X/Y-retningens afvigelser) muliggør realtidjusteringer af extruderhoved for automatisk kabel ekscentricitetskorrektion.
Højere målehastigheder reducerer jitterfejl: 1000 målinger/sekund opnår tusindedele præcision. De fleste importerede produkter (hundrede målinger/sekund) påstår ekscentricitetspræcision under antagelsen om en centreret ledning (matcher ydre diameterpræcision, givet som ±μm absolutte værdier, ikke procent – ikke overensstemmende).
3.1 LED×CCD diametermåling
Baseret på telecentrisk optik, bruger det lysblokering til at skabe lys-mørke CCD-regioner. Algoritmer analyserer kanter for at beregne dimensioner. Global CCD eksponering (samtidig pixelsensing) forårsager jitter-induceret kanterus (lodret → skæve linjer), men algoritmer løser kanter og eliminerer fejl.
3.2 Noter om optisk diametermåling
Ikke fokuspunktet, men nøglepunkt: Kabel ekscentricitetsmåling kræver realtid optisk capture af fire isolationslag vertexpositioner (ikke bare dimensioner). Motor-scannede lasermetoder risikerer asynkrone målingsfejl. Derfor er synkronisering af optiske og elektromagnetiske målinger afgørende for instrumentudvikling.
4 Konklusion
Det elektromagnetisk induktion-baserede instrument måler hurtigt ledningens elektriske centrum, med lav kost og fordele. Ved at adressere importerede produkters elektromagnetiske målingsfejl, er en ny fotoelektromagnetisk kabelekscentrimeter udviklet (tusindedele præcision). Teknologi udvikler sig – fremtidige materialfremskridt vil muliggøre højere præcision, driver industripakken fremad.










