

มอเตอร์ซิงโครนัสเป็นมอเตอร์ไฟฟ้ากระแสสลับที่ทำงานด้วยความเร็วคงที่ตามความถี่ของแหล่งจ่ายไฟและจำนวนขั้ว ไม่เหมือนกับมอเตอร์เหนี่ยวนำ มอเตอร์ซิงโครนัสทำงานที่ความเร็วซิงโครนัสโดยไม่มีการลื่น
มอเตอร์ซิงโครนัสนำไปใช้ในหลากหลายแอปพลิเคชัน รวมถึง
ระบบขับเคลื่อนอุตสาหกรรม,
การผลิตไฟฟ้า
คอนเดนเซอร์ซิงโครนัสสำหรับปรับปรุงแฟคเตอร์พาวเวอร์, และ
ระบบควบคุมการเคลื่อนไหวที่แม่นยำ.
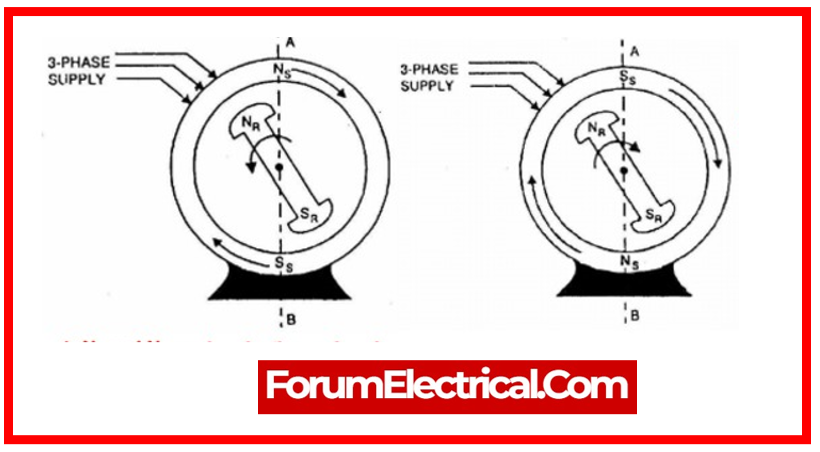
มอเตอร์ซิงโครนัสรักษาความสอดคล้องเนื่องจากโรเตอร์หมุน (การหมุน) ที่อัตราเดียวกับสนามแม่เหล็กที่หมุนของสเตเตอร์

ความเร็วของมอเตอร์ซิงโครนัสมีความสัดส่วนตรงกับความถี่ของแหล่งจ่ายไฟและกลับกันกับจำนวนขั้วในมอเตอร์
เนื่องจากคุณสมบัติความเร็วซิงโครนัสที่กำหนดไว้ มอเตอร์ซิงโครนัสไม่สามารถจัดการโหลดที่ผันผวนได้ดีเท่ามอเตอร์เหนี่ยวนำ
เมื่อมอเตอร์ซิงโครนัสสูญเสียความสอดคล้องกับแหล่งจ่ายไฟ มันจะหยุดทำงานอย่างมีประสิทธิภาพและอาจต้องทำการซิงโครไนซ์ใหม่ก่อนที่จะสามารถเริ่มต้นทำงานใหม่ได้
อุปกรณ์เสริมเช่น วงจรระบาย (หรือ) มอเตอร์เริ่มต้นมักใช้เพื่อให้มอเตอร์ซิงโครนัสเริ่มต้นทำงานจนถึงความเร็วซิงโครนัสก่อนที่จะทำการซิงโครไนซ์กับแหล่งจ่ายไฟ
เมื่อเทียบกับมอเตอร์เหนี่ยวนำ มอเตอร์ซิงโครนัสนำเสนอ
การปรับปรุงแฟคเตอร์พาวเวอร์,
ประสิทธิภาพสูงภายใต้โหลดคงที่, และ
การควบคุมความเร็วอย่างแม่นยำ.
เพื่อทำงานที่ความเร็วต่างๆ มอเตอร์ซิงโครนัสต้องใช้ระบบควบคุมภายนอก เช่น เครื่องขับความถี่แปรผัน (VFDs).
มอเตอร์ซิงโครนัสประกอบด้วยสเตเตอร์ โรเตอร์ ระบบกระตุ้น และในบางกรณี วงจรระบายหรือระบบเริ่มต้น
ระบบกระตุ้นสร้างสนามแม่เหล็กโดยการจ่ายกระแสตรงไปยังวงจรโรเตอร์
สนามนี้จะซิงโครไนซ์กับสนามแม่เหล็กที่หมุนของสเตเตอร์ ทำให้มอเตอร์สามารถทำงานที่ ความเร็วซิงโครนัส
มอเตอร์ซิงโครนัส ขึ้นอยู่กับระบบกระตุ้นในการให้สนามแม่เหล็กที่จำเป็นสำหรับความสอดคล้องกับ สนามของสเตเตอร์
มีสองประเภท:
ระบบกระตุ้นด้วยกระแสตรง – ใช้กำลังไฟกระแสตรงเพื่อจ่ายให้โรเตอร์, และ
ระบบกระตุ้นด้วยแม่เหล็กถาวร – ใช้แม่เหล็กถาวรในโรเตอร์เพื่อสร้างสนามแม่เหล็ก.
โดยการปรับกระแสกระตุ้น มอเตอร์ซิงโครนัสสามารถเปลี่ยนแปลงแฟคเตอร์พาวเวอร์ของตนเองได้
แฟคเตอร์พาวเวอร์ของมอเตอร์สามารถปรับปรุงหรือแก้ไขได้โดยการเปลี่ยนแปลงกระแสกระตุ้น
วงจรระบายช่วยให้มอเตอร์เริ่มต้นทำงานโดยอนุญาตให้มีการลื่นเล็กน้อยก่อนที่จะเข้าสู่ความเร็วซิงโครนัส
นอกจากนี้ยังช่วยในการรักษาความเสถียรของมอเตอร์ในกรณีที่มีการเปลี่ยนแปลงโหลดอย่างไม่คาดคิด

มอเตอร์ซิงโครนัสทำงานที่ความเร็วซิงโครนัสและอาจไม่เหมาะสมสำหรับแอปพลิเคชันที่ต้องการแรงบิดสูงที่ความเร็วต่ำ เว้นแต่จะใช้การทดเกียร์ (หรือ) การแก้ไขเพิ่มเติม
ในการควบคุมความเร็วของมอเตอร์ซิงโครนัส มักจะมีการจัดการการกระตุ้น (หรือ) การเปลี่ยนแปลงความถี่ของ แหล่งจ่ายไฟผ่านเครื่องขับความถี่แปรผัน (VFDs)
มอเตอร์ซิงโครนัสแบบ reluctance ใช้หลักการ torque แบบ reluctance และมีรูปร่างโรเตอร์ที่เรียบง่ายโดยไม่มีวงจรหรือแม่เหล็ก เมื่อเทียบกับมอเตอร์ซิงโครนัสแบบดั้งเดิม มีศักยภาพในการมีประสิทธิภาพสูงขึ้นและการสร้างที่ง่ายขึ้น
เนื่องจากความสามารถในการรักษาความสอดคล้องกับแหล่งจ่ายไฟ มอเตอร์ซิงโครนัสที่ทำงานที่ความเร็วสูงกว่าความเร็วซิงโครนัสสามารถทำงานเป็นเครื่องกำเนิดไฟฟ้า แปลง พลังงานกลเป็น พลังงานไฟฟ้า
สูตร RPM สำหรับความเร็วซิงโครนัสคือ
ความเร็วซิงโครนัสของมอเตอร์ (RPM) = (120 X ความถี่) / จำนวนขั้ว
ความเร็วซิงโครนัสของมอเตอร์ (RPM) = (120 X f)/P
จำนวนขั้วในมอเตอร์ซิงโครนัสนั้นขึ้นอยู่กับการออกแบบและโครงสร้างของมอเตอร์ เป็นคุณสมบัติที่กำหนดโดยผู้ผลิต
ในแอปพลิเคชันที่ต้องการความเร็วคงที่และความมีประสิทธิภาพสูง เช่น
ปั๊มอุตสาหกรรม,
คอมเพรสเซอร์, พัดลม, และ
เครื่องจักรอุตสาหกรรมบางชนิด,
มอเตอร์ซิงโครนัส
ถูกเลือกใช้
มุมโหลดคือความต่างทางมุมระหว่างสนามแม่เหล็กของสเตเตอร์และโรเตอร์
การปรับมุมโหลดให้เหมาะสมมีความสำคัญต่อประสิทธิภาพและความสอดคล้องของมอเตอร์









{kind=link}