

Motor sinkron adalah motor AC yang beroperasi pada kecepatan konstan yang ditentukan oleh frekuensi sumber daya dan jumlah kutub. Berbeda dengan motor induksi, motor sinkron beroperasi pada kecepatan sinkron tanpa slip.
Motor sinkron digunakan dalam berbagai aplikasi, termasuk
Penggerak industri,
Pembangkit listrik
Kondensor sinkron untuk koreksi faktor daya, dan
Sistem kontrol gerakan presisi.
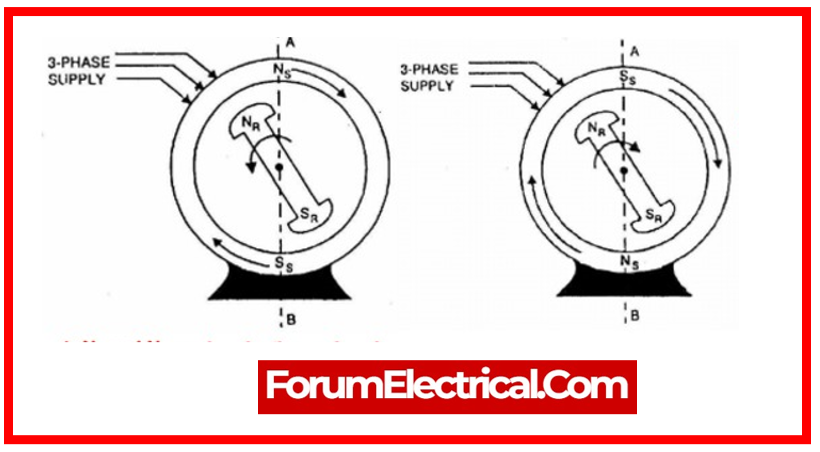
Motor sinkron mempertahankan sinkronisasi karena rotor berputar (rotasi) dengan laju yang sama dengan medan magnet putaran stator.

Kecepatan motor sinkron sebanding dengan frekuensi sumber daya dan berbanding terbalik dengan jumlah kutub di motor.
Karena karakteristik kecepatan sinkron yang tetap, motor sinkron kurang efisien dalam menangani beban yang bervariasi dibandingkan motor induksi.
Ketika motor sinkron kehilangan sinkronisasi dengan sumber daya, ia berhenti bekerja secara efisien dan mungkin perlu disinkronkan kembali sebelum dapat dinyalakan kembali.
Perangkat bantu seperti lilitan damper (atau) motor penghidup sering digunakan untuk membawa motor sinkron ke kecepatan sinkron sebelum disinkronkan dengan sumber daya.
Dibandingkan dengan motor induksi, motor sinkron memberikan
Koreksi faktor daya yang lebih baik,
Efisiensi yang lebih tinggi di bawah beban konstan, dan
Kontrol kecepatan yang presisi.
Untuk beroperasi pada kecepatan yang bervariasi, motor sinkron memerlukan sistem kontrol eksternal seperti drive variabel frekuensi (VFD).
Motor sinkron terdiri dari stator, rotor, sistem eksitasi, dan dalam beberapa kondisi, lilitan damper atau mekanisme penghidup.
Sistem eksitasi menghasilkan medan magnet dengan menyuplai arus searah ke lilitan rotor.
Medan ini disinkronkan dengan medan magnet putaran stator, memungkinkan motor berjalan pada kecepatan sinkron.
Di sisi lain, motor sinkron bergantung pada sistem eksitasi untuk menyediakan medan magnet yang diperlukan untuk sinkronisasi dengan medan stator.
Ada dua jenis:
Sistem eksitasi DC – yang menggunakan daya DC untuk menghidupkan rotor, dan
Sistem eksitasi magnet permanen – yang menggunakan magnet permanen di rotor untuk menghasilkan medan magnet.
Dengan menyesuaikan arus eksitasi, motor sinkron dapat memodifikasi faktor dayanya.
Faktor daya motor dapat ditingkatkan atau dikoreksi dengan mengubah eksitasi.
Lilitan damper membantu motor dalam proses penghidupan dengan memungkinkan adanya sedikit slip awal sebelum mencapai kecepatan sinkron.
Hal ini juga membantu stabilitas motor selama fluktuasi beban yang tidak terduga.

Motor sinkron biasanya berfungsi pada kecepatan sinkron dan mungkin bukan solusi terbaik untuk aplikasi yang membutuhkan torsi tinggi pada kecepatan rendah, kecuali jika digunakan peralatan tambahan (atau) modifikasi.
Dalam motor sinkron, regulasi kecepatan sering melibatkan pengendalian eksitasi (atau) modifikasi frekuensi sumber daya melalui drive variabel frekuensi (VFD).
Motor sinkron reluctance menggunakan prinsip torsi reluctance & memiliki bentuk rotor yang disederhanakan tanpa lilitan atau magnet. Dibandingkan dengan motor sinkron biasa, mereka memiliki potensi untuk efisiensi yang lebih baik dan konstruksi yang lebih sederhana.
Karena kapasitasnya untuk mempertahankan sinkronisasi dengan sumber daya, motor sinkron yang beroperasi di atas kecepatan sinkron dapat berfungsi sebagai generator, mengubah energi mekanik menjadi energi listrik.
Rumus RPM untuk kecepatan sinkron adalah
Kecepatan Motor Sinkron (RPM) = (120 X Frekuensi) / Jumlah Kutub
Kecepatan Motor Sinkron (RPM) = (120 X f)/P
Jumlah kutub di motor sinkron ditentukan oleh desain dan konstruksi motor. Ini adalah fitur tetap yang ditentukan oleh produsen.
Dalam aplikasi yang membutuhkan kecepatan konsisten dan efisiensi yang sangat baik, seperti
Pompa industri,
Kompresor, kipas, dan
Beberapa jenis mesin industri,
Motor sinkron dipilih.
dipilih.
Sudut beban adalah perbedaan sudut antara medan magnet stator dan rotor.
Penyesuaian sudut beban yang tepat sangat penting untuk efisiensi dan sinkronisasi motor.
Motor sinkron, yang dikenal sebagai kondensor sinkron, dapat berfungsi dalam mode penggerak sambil juga menghasilkan daya listrik ke jaringan sebagai generator dalam kondisi tertentu.
Untuk mengurangi hunting atau ketidakstabilan pada motor sinkron, beberapa sistem kontrol dan teknologi stabilisasi, seperti
Regulator Tegangan Otomatis (AVRs) &
Stabilisator Sistem Daya (PSSs),
digunakan.
Optimasi sistem kontrol eksitasi mempengaruhi efisiensi, stabilitas, dan respons terhadap beban yang bervariasi dari motor, serta faktor daya.









{kind=link}