

Un motore sincrono è un motore a corrente alternata che funziona a una velocità costante specificata dalla frequenza dell'alimentazione e dal numero di poli. A differenza dei motori a induzione, i motori sincroni operano alla velocità sincrona senza scivolamento.
I motori sincroni vengono utilizzati in una varietà di applicazioni, tra cui
Azionamenti industriali,
Generazione di energia
Condensatori sincroni per la correzione del fattore di potenza, e
Sistemi di controllo del movimento preciso.
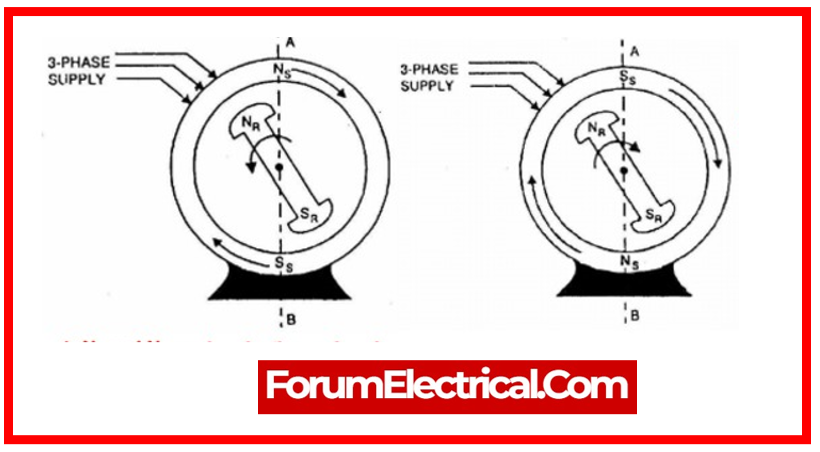
I motori sincroni mantengono la sincronizzazione poiché il rotore ruota (rotazione) alla stessa velocità del campo magnetico rotante dello statore.

La velocità di un motore sincrono è proporzionale alla frequenza della fonte di alimentazione e inversamente proporzionale al numero di poli nel motore.
A causa delle loro caratteristiche di velocità sincrona fissa, i motori sincroni risultano meno efficienti nella gestione di carichi variabili rispetto ai motori a induzione.
Quando un motore sincrono perde la sincronizzazione con la fonte di alimentazione, smette di funzionare in modo efficiente e potrebbe essere necessario ri-sincronizzarlo prima di poterlo riavviare.
Per far raggiungere ai motori sincroni la velocità sincrona prima di sincronizzarsi con la fonte di alimentazione, vengono comunemente utilizzati dispositivi ausiliari come avvolgimenti di freno (o) motori di avviamento.
In confronto ai motori a induzione, i motori sincroni offrono maggiori
Correzioni del fattore di potenza,
Maggior efficienza sotto carico costante, e
Controllo di velocità preciso.
Per funzionare a velocità diverse, i motori sincroni necessitano di sistemi di controllo esterni come i variabili di frequenza (VFD).
Un motore sincrono è composto da uno statore, un rotore, un sistema di eccitazione e, in alcune condizioni, un avvolgimento di freno o un meccanismo di avviamento.
Il sistema di eccitazione genera un campo magnetico fornendo corrente continua agli avvolgimenti del rotore.
Questo campo si sincronizza con il campo magnetico rotante dello statore, permettendo al motore di funzionare alla velocità sincrona.
Al contrario, i motori sincroni dipendono dal sistema di eccitazione per fornire il campo magnetico necessario per la sincronizzazione con il campo dello statore.
Ci sono due tipi:
Sistemi di eccitazione a corrente continua – che usano la corrente continua per alimentare il rotore, e
Sistemi di eccitazione a magnete permanente – che usano magneti permanenti nel rotore per generare il campo magnetico.
Regolando la corrente di eccitazione, i motori sincroni possono modificare il loro fattore di potenza.
Il fattore di potenza del motore può essere migliorato o corretto alterando l'eccitazione.
L'avvolgimento di freno assiste l'avviamento del motore consentendo un certo slittamento iniziale prima di raggiungere la velocità sincrona.
Aiuta anche la stabilità del motore durante fluttuazioni di carico impreviste.

I motori sincroni funzionano normalmente a velocità sincrone e potrebbero non essere la soluzione migliore per applicazioni richiedenti alta coppia a basse velocità, a meno che non vengano utilizzate ulteriori ingranaggi (o) modifiche.
Nel caso dei motori sincroni, la regolazione della velocità spesso coinvolge la gestione dell'eccitazione (o) la modifica della frequenza dell'alimentazione tramite variabili di frequenza (VFD).
I motori sincroni a riluttanza utilizzano il principio del momento di riluttanza e presentano una forma semplificata del rotore senza avvolgimenti o magneti. In confronto ai motori sincroni tradizionali, offrono potenzialmente maggiore efficienza e costruzione più semplice.
Grazie alla sua capacità di mantenere la sincronizzazione con la fonte di alimentazione, i motori sincroni funzionanti a velocità superiore alla sincrona possono operare come generatori, trasformando l'energia meccanica in energia elettrica.
La formula RPM per la velocità sincrona è
Velocità del motore sincrono (RPM) = (120 X Frequenza) / Numero di poli
Velocità del motore sincrono (RPM) = (120 X f)/P
Il numero di poli in un motore sincrono è determinato dalla progettazione e costruzione del motore. È una caratteristica fissa specificata dal produttore.
In applicazioni che richiedono una velocità costante e un'efficienza elevata, come
Pompe industriali,
Compressori, ventilatori, e
Certi tipi di macchinari industriali,
I motori sincroni
vengono scelti.
L'angolo di carico è la differenza angolare tra i campi magnetici dello statore e del rotore.
Un adeguato aggiustamento dell'angolo di carico è fondamentale per l'efficienza e la sincronizzazione del motore.
I motori sincroni, noti come condensatori sincroni, possono funzionare in modalità di trazione mentre generano elettricità per la rete come generatori in determinate condizioni.
Per ridurre l'oscillazione o l'instabilità nei motori sincroni, vengono impiegati diversi sistemi di controllo e tecnologie stabilizzatrici, come
Regolatori di tensione automatici (AVRs) e
Stabilizzatori del sistema di potenza (PSSs).
vengono utilizzati.
Ottimizzare il sistema di controllo dell'eccitazione influenza l'efficienza, la stabilità e la reazione ai carichi variabili del motore, nonché il suo fattore di pot









{kind=link}