

Motoci na tsari (synchronous motor) shin motoci na AC wanda ke yi aiki a gaba da sauki mai sunan da aka bayar da shi da kuma adadin poli. Motocin na tsari, kafin haka motocin na induction, ke yi aiki a gaba da sauki mai tsari bane ba.
Motocin na tsari suke amfani da su a cikin abubuwan da dama, sama da
Industrial drives,
Power generation
Synchronous condensers na power factor correction, and
Precise motion control systems.
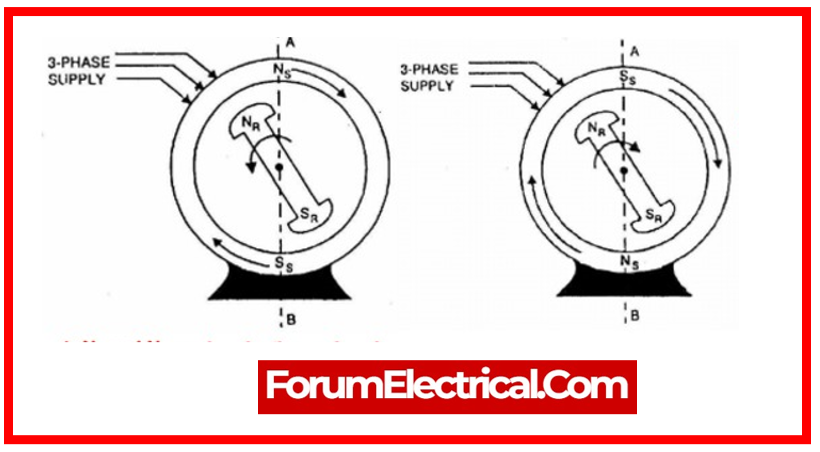
Motocin na tsari ke samun synchronism saboda rotor (rotation) ke yi aiki a gaba da sauki mai tsari na stator.

Saukin motoci na tsari ya zama da sauki mai frequency ta power source da kuma kadan poli a motoci.
Saboda sifatinsu na synchronous speed, motocin na tsari suke zama da mafi karfi a yi aiki don yanayin loads da kuma motocin na induction.
Idan motoci na tsari ya fara synchronism da power source, ya zama da mafi karfi a yi aiki kuma ana bukatar da ake resynchronize da kuma ake restart.
Akwai devices masu aiki a kusa kamar damper windings (or) starting motors suke amfani da su don haɗa motocin na tsari zuwa synchronous speed kabara synchronizing da power source.
Kafin haka motocin na induction, motocin na tsari suke da faɗa a kan
Power factor correction,
Higher efficiency under constant load, and
Precision speed control.
Don yi aiki a cikin speeds daban-daban, motocin na tsari suke buƙata external control systems kamar variable frequency drives (VFDs).
Motoci na tsari an samu a kan stator, rotor, excitation system, and, in some conditions, damper winding or a starting mechanism.
Excitation system ya yi magnetic field tare da direct current to rotor windings.
This field synchronizes with the rotating magnetic field of the stator, allowing motor to run at a synchronous speed.
Motocin na tsari, on the other end, rely on the excitation system to provide the magnetic field required for synchronism with stator field.
There are two types:
DC excitation systems – which use DC power to power the rotor, and
Permanent magnet excitation systems – which use permanent magnets in the rotor to generate the magnetic field.
By adjusting the excitation current, synchronous motors can modify their power factor.
The power factor of the motor can be improved or corrected by altering the excitation.
The damper winding assists the motor in starting by allowing for some early slip prior to attaining synchronous speed.
It also assists in the motor’s stability amid unexpected load fluctuations.

Motocin na tsari normally function at synchronous rates and may not be the best solution for applications demanding high torque at low speeds unless additional gearing (or) modifications are used.
In synchronous motors, speed regulation frequently involves managing the excitation (or) modifying frequency of power supply via variable frequency drives (VFDs).
Synchronous reluctance motors utilize the reluctance torque principle & feature a simplified rotor shape without windings or magnets. When compared to typical synchronous motors, they have the potential for improved efficiency and simpler construction.
Because of its capacity to maintain synchronism with the power source, synchronous motors are functioning above synchronous speed can operate as generators, transforming the mechanical energy into the electrical energy.
The RPM formula for synchronous speed is
Synchronous Motor Speed (RPM) = (120 X Frequency) / Number of Poles
Synchronous Motor Speed (RPM) = (120 X f)/P
The number of poles in synchronous motor is governed by the motor’s design and construction. It is a fixed feature that the manufacturer specifies.
In applications requiring consistent speed and excellent efficiency, such as
Industrial pumps,
Compressors, fans, and
Certain types of industrial machinery,
Synchronous motors
are chosen.
The load angle is the angular difference between the magnetic fields of the stator and the rotor.
Proper load angle adjustment is critical for the motor’s efficiency and synchronism.
Synchronous motors, known as synchronous condensers, can function in driving mode while also generating electrical power to grid as generators in specific conditions.
To minimize hunting or instability in synchronous motors, several control systems and stabilizing technologies, such as
Automated Voltage Regulators (AVRs) &
Power System Stabilizers (PSSs),
are employed.
Optimizing excitation control system effects the efficiency, stability, and reaction to varying loads of the motor, as well as its power factor.
The
Required speed,
Torque characteristics,
Power factor requirements,
Efficiency, and
Capacity to control the motor’s operation
are all









{kind=link}