

Un moteur synchrone est un moteur à courant alternatif qui fonctionne à une vitesse constante déterminée par la fréquence de l'alimentation électrique et le nombre de pôles. Contrairement aux moteurs à induction, les moteurs synchrones fonctionnent à la vitesse synchrone sans glissement.
Les moteurs synchrones sont utilisés dans diverses applications, notamment :
Les entraînements industriels,
La production d'énergie,
Les condensateurs synchrones pour la correction du facteur de puissance, et
Les systèmes de contrôle de mouvement précis.
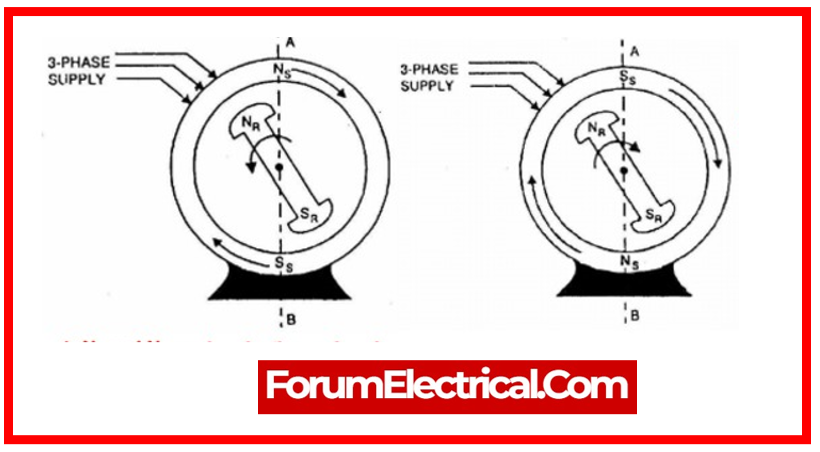
Les moteurs synchrones maintiennent la synchronisation car le rotor tourne (rotation) à la même vitesse que le champ magnétique tournant du stator.

La vitesse d'un moteur synchrone est proportionnelle à la fréquence de la source d'alimentation et inversement proportionnelle au nombre de pôles du moteur.
En raison de leurs caractéristiques de vitesse synchrone fixe, les moteurs synchrones sont moins efficaces pour gérer les charges variables que les moteurs à induction.
Lorsqu'un moteur synchrone perd sa synchronisation avec la source d'alimentation, il cesse de fonctionner efficacement et peut nécessiter une resynchronisation avant de pouvoir être redémarré.
Des dispositifs auxiliaires tels que les bobinages amortisseurs (ou) des moteurs de démarrage sont généralement utilisés pour amener les moteurs synchrones à la vitesse synchrone avant de les synchroniser avec la source d'alimentation.
Par rapport aux moteurs à induction, les moteurs synchrones offrent une meilleure :
Correction du facteur de puissance,
Efficacité sous charge constante, et
Contrôle de vitesse précis.
Pour fonctionner à des vitesses variables, les moteurs synchrones nécessitent des systèmes de contrôle externes tels que les variateurs de fréquence (VFD).
Un moteur synchrone est composé d'un stator, d'un rotor, d'un système d'excitation et, dans certaines conditions, d'un bobinage amortisseur ou d'un mécanisme de démarrage.
Le système d'excitation génère un champ magnétique en alimentant les bobinages du rotor en courant continu.
Ce champ se synchronise avec le champ magnétique tournant du stator, permettant au moteur de fonctionner à la vitesse synchrone.
D'autre part, les moteurs synchrones dépendent du système d'excitation pour fournir le champ magnétique nécessaire à la synchronisation avec le champ du stator.
Il existe deux types :
Systèmes d'excitation à courant continu – qui utilisent du courant continu pour alimenter le rotor, et
Systèmes d'excitation à aimants permanents – qui utilisent des aimants permanents dans le rotor pour générer le champ magnétique.
En ajustant le courant d'excitation, les moteurs synchrones peuvent modifier leur facteur de puissance.
Le facteur de puissance du moteur peut être amélioré ou corrigé en modifiant l'excitation.
Le bobinage amortisseur aide le moteur à démarrer en permettant un certain glissement initial avant d'atteindre la vitesse synchrone.
Il contribue également à la stabilité du moteur face aux fluctuations de charge inattendues.

Les moteurs synchrones fonctionnent généralement à des vitesses synchrone et ne sont pas la meilleure solution pour les applications nécessitant un couple élevé à basse vitesse, sauf si des engrenages supplémentaires (ou) des modifications sont utilisés.
Dans les moteurs synchrones, la régulation de la vitesse implique souvent la gestion de l'excitation (ou) la modification de la fréquence de l'alimentation via des variateurs de fréquence (VFD).
Les moteurs synchrone à réluctance utilisent le principe du couple de réluctance et présentent une forme de rotor simplifiée sans bobinages ni aimants. Comparés aux moteurs synchrones traditionnels, ils ont le potentiel d'une meilleure efficacité et d'une construction plus simple.
En raison de leur capacité à maintenir la synchronisation avec la source d'alimentation, les moteurs synchrones fonctionnant à une vitesse supérieure à la vitesse synchrone peuvent fonctionner comme des générateurs, transformant l'énergie mécanique en énergie électrique.
La formule de calcul de la vitesse synchrone en tours par minute (RPM) est :
Vitesse synchrone (RPM) = (120 x Fréquence) / Nombre de pôles
Vitesse synchrone (RPM) = (120 x f) / P
Le nombre de pôles d'un moteur synchrone est déterminé par la conception et la construction du moteur. C'est une caractéristique fixe spécifiée par le fabricant.
Dans les applications nécessitant une vitesse constante et une excellente efficacité, telles que :
Les pompes industrielles,
Les compresseurs, les ventilateurs, et
Certaines machines industrielles,
Les moteurs synchrones sont choisis.
sont sélectionnés.
L'angle de charge est la différence angulaire entre les champs magnétiques du stator et du rotor.
Un réglage approprié de l'angle de charge est crucial pour l'efficacité et la synchronisation du moteur.
Les moteurs synchrones, connus sous le nom de condensateurs synchrones, peuvent fonctionner en mode de propulsion tout en générant de l'électricité pour le réseau en tant que générateurs dans certaines conditions.
Pour minimiser la chasse ou l'instabilité dans les moteurs synchrones, plusieurs systèmes de contrôle et technologies de stabilisation, tels que :
Régulateurs de tension automatiques (AVRs) & et
Stabilisateurs de système de puissance (PSS),
sont utilisés.
L'optimisation du système de contrôle d'excitation influence l'efficacité, la stabilité et la réaction aux charges variables du moteur, ainsi que son facteur de puissance.









{kind=link}