

Motor synchronus est motor AC qui constanter operatur ad celeritatem a frequentia alimenti electrici et numero polorum specificata. Motores synchro, contra motus inductionis, operantur ad celeritatem synchrom sine latitudine.
Motores synchrom in variis applicationibus utuntur, inter quas
motus industriales,
generatio potestatis
correctores factoris potentiae condensatores synchrom, et
systemata controlis motus precisae.
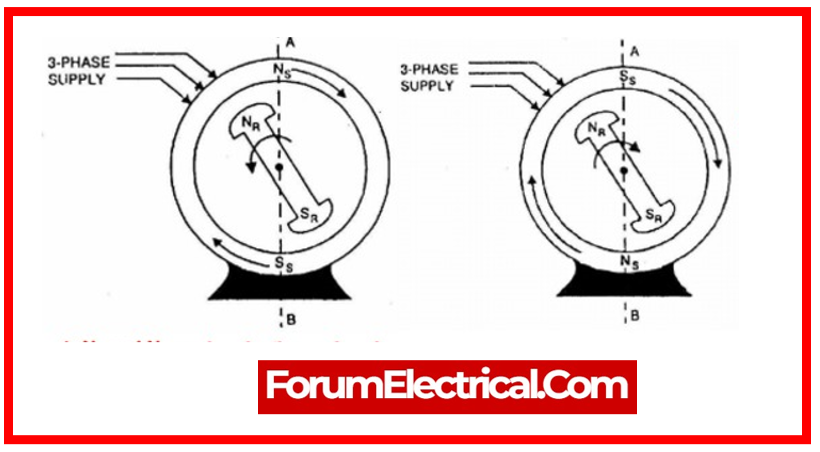
Motores synchrom sustinent synchronism quia rotor (rotatio) operatur ad eandem celeritatem quam campum magneticum rotantis statoris.

Celeritas motoris synchrom proportionalis est frequentiae alimenti electrici et inverso proportionalis numero polorum in motore.
Propter suas characteres celeritatis synchrom, motores synchrom minus efficientes sunt in tractando onera variabilia quam motores inductionis.
Cum motor synchrom perdiderit synchronism cum alimento electrico, inefficax operatur et resynchromizari fortasse oportet antequam iterum incipiat.
Auxilia tali modo ut bobinamenta dampers (vel) motores initiatores communiter utuntur ad motores synchrom ad celeritatem synchrom adducendos priusquam synchronizentur cum alimento electrico.
Comparatione cum motoribus inductionis, motores synchrom maiorem
correctionem factoris potentiae,
efficienciam sub onere constante, et
controlis celeritatis precisionem praebent.
Ad varias celeritates operandi, motores synchrom systemata externa controlis sicut variabiles conductores frequentiae (VFDs).
Motor synchrom constat ex stator, rotor, systemate excitationis, et, in quibusdam conditionibus, bobinamento dampers vel mechanismo initiatorio.
Systema excitationis generat campum magneticum suppeditando currentem directum ad bobinamenta rotoris.
Hic campus synchronizatur cum campo magnetico rotanti statoris, permittens motorem ad celeritatem synchronam operari.
Motores synchrom, altera parte, dependent a systemate excitationis ad campum magneticum necessarium pro synchronismo cum campo statoris praebendo.
Sunt duo genera:
systemata excitationis DC – quae utuntur potestate DC ad rotoris roborandum, et
systemata excitationis magnete permanente – quae utuntur magnetibus permanentibus in rotore ad campum magneticum generandum.
Per excitationis currentem regendum, motores synchrom possunt suum factor potestatis modificare.
Factor potestatis motoris meliorari aut corrigi potest per excitationis mutationem.
Bobinamentum dampers motori initium facit permittendo aliquam pristinam latitudinem ante attingendum celeritatem synchrom.
Item ad stabilitatem motoris inter fluctuationes onerum inopinatas auxiliatur.

Motores synchrom normaliter ad celeritates synchrom operantur et non optimi solutio sunt pro applicationibus postulantibus momentum magnum ad celeritatibus parvis nisi additiones gearing (vel) modificationes utuntur.
In motoribus synchrom, celeritatis regulatio saepissime involvit excitationis managementum (vel) mutationem frequentiae alimenti electrici per variabiles conductores frequentiae (VFDs).
Motores synchrom reluctance principium torque reluctance utuntur et formam simplificatam rotoris sine bobinamentis aut magnetibus habent. Comparatione cum motoribus synchrom typicalis, potentialia ad efficaciam meliorem et constructionem simpliciorem habent.
Propter suam capacitatem ad synchronism cum alimento electrico sustinentem, motores synchrom operantes supra celeritatem synchrom posse ut generatores operari, transformantes potentiam mechanicam in electricam.
Formula RPM pro celeritate synchrom est
Celeritas Motoris Synchrom (RPM) = (120 X Frequentia) / Numerus Polorum
Celeritas Motoris Synchrom (RPM) = (120 X f)/P
Numerus polorum in motoribus synchrom regitur designo et constructione motoris. Est feature fixum quod fabricator specificat.
In applicationibus requirientibus celeritatem constantem et excellentem efficienciam, sicut
industriales pompae,
compressores, ventillatores, et
certi genera machinarum industrialium,
motores synchrom
eliguntur.
Angulus oneris est differentia angularis inter campos magneticos statoris et rotoris.
Recta anguli oneris adjustatio est crucialis pro efficiencia et synchronismo motoris.
Motores synchrom, noti ut condensatores synchrom, possunt in modo ductionis operari simul et potentiam electricam ad retem generare ut generatoribus in certis conditionibus.
Ad minimendum hunting vel instabilitatem in motoribus synchrom, plura systemata controlis et stabilizantes technologias, sicut
Regulatores Voltage Automati (AVRs) &
Stabilizatores Systematis Potentiae (PSSs),
uti solent.
Optimizatio systematis controlis excitationis effectus habet in efficiencia, stabilitate, et reactione ad onera variabilia motoris, tamquam etiam in suo factor potestatis.
Requisita









{kind=link}