

Синхронний двигун — це альтернативний двигун, який працює на постійній швидкості, заданій частотою живлення та кількістю полюсів. Синхронні двигуни, на відміну від індукційних, працюють на синхронній швидкості без прослизу.
Синхронні двигуни використовуються у різних застосуваннях, включаючи
Промислові приводи,
Виробництво електроенергії
Синхронні конденсатори для корекції коефіцієнта потужності, та
Системи точного керування рухом.
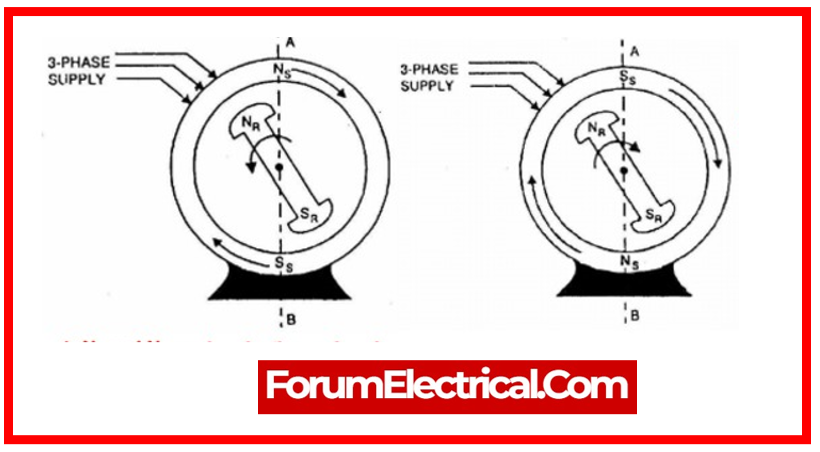
Синхронні двигуни підтримують синхронізм, оскільки ротор обертається (обертання) з такою ж швидкістю, як і обертаючеся магнітне поле статора.

Швидкість синхронного двигуна пропорційна частоті джерела живлення та обернено пропорційна кількості полюсів у двигуні.
Завдяки своїм характеристикам синхронної швидкості, синхронні двигуни менш ефективні при обробці змінних навантажень, ніж індукційні двигуни.
Коли синхронний двигун втрачає синхронізм з джерелом живлення, він перестає працювати ефективно і може знадобитися повторна синхронізація перед його запуском.
Для запуску синхронних двигунів до синхронної швидкості перед синхронізацією з джерелом живлення часто використовуються допоміжні пристрої, такі як гасні в’язи (або) пускові двигуни.
Порівняно з індукційними двигунами, синхронні двигуни забезпечують більші
Корекцію коефіцієнта потужності,
Більшу ефективність при постійному навантаженні, та
Точне керування швидкістю.
Для роботи на змінних швидкостях синхронним моторам потрібні зовнішні системи керування, такі як приводи змінної частоти (VFDs).
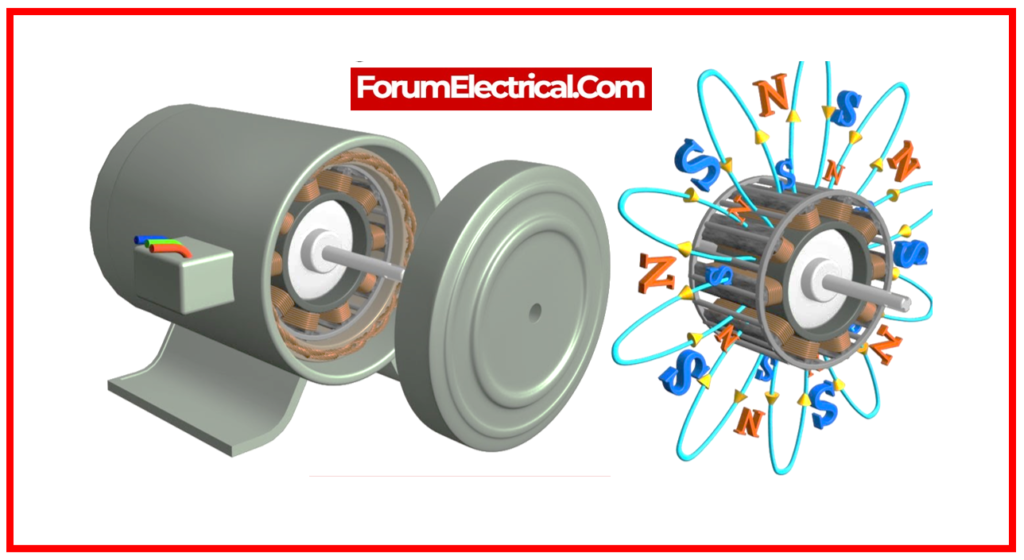
Синхронний мотор складається з статора, ротора, системи збудження і, в деяких умовах, затишного витка або механізму запуску.
Система збудження генерує магнітне поле, надаючи постійний струм до витків ротора.
Це поле синхронізується з обертовим магнітним полем статора, що дозволяє мотору працювати на синхронній швидкості.
Синхронні мотори, навпаки, залежать від системи збудження для забезпечення магнітного поля, необхідного для синхронізації з полем статора.
Існує два типи:
DC-системи збудження – які використовують постійний струм для живлення ротора, і
системи збудження на постійних магнітах – які використовують постійні магніти в роторі для генерації магнітного поля.
Змінюючи струм збудження, синхронні мотори можуть модифікувати свій коефіцієнт ефективності.
Коефіцієнт ефективності мотора можна покращити або виправити, змінюючи збудження.
Затишний виток допомагає мотору запуститися, дозволяючи певному прослизу перед досягненням синхронної швидкості.
Він також допомагає стабілізувати мотор при непередбачених коливаннях навантаження.

Синхронні мотори зазвичай працюють на синхронних швидкостях і можуть не бути найкращим рішенням для застосувань, що потребують високого моменту при низьких швидкостях, якщо не використовуються додаткові передачі (або) модифікації.
У синхронних моторах регулювання швидкості часто включає управління збудженням (або) зміну частоти живлення через приводи змінної частоти (VFDs).
Синхронні релюктантні двигуни використовують принцип релюктантного моменту і мають спрощену форму ротора без обмоток або магнітів. Порівняно з типовими синхронними двигунами, вони мають потенціал для покращеної ефективності та простішої конструкції.
Завдяки своєму здатності підтримувати синхронізацію з джерелом живлення, синхронні двигуни, що працюють над синхронною швидкістю, можуть функціонувати як генератори, перетворюючи механічну енергію на електричну.
Формула для розрахунку синхронної швидкості у об/хв:
Синхронна швидкість (об/хв) = (120 х Частота) / Кількість полюсів
Синхронна швидкість (об/хв) = (120 х f)/P
Кількість полюсів у синхронному двигуні визначається проектуванням та конструкцією двигуна. Це фіксована характеристика, яку вказує виробник.
У застосуваннях, де потрібна постійна швидкість та висока ефективність, таких як
Промислові насоси,
Компресори, вентилятори та
Певні види промислового обладнання,
синхронні двигуни
обираються.
Кут навантаження — це кутова різниця між магнітними полями статора та ротора.
Правильне регулювання кута навантаження є ключовим для ефективності та синхронізації двигуна.
Синхронні двигуни, відомі як синхронні конденсатори, можуть функціонувати в режимі приводу, а також генерувати електричну енергію до мережі як генератори у певних умовах.
Для зменшення коливань або нестабільності в синхронних двигунах використовуються різні системи керування та технології стабілізації, такі як
Автоматичні регулятори напруги (AVRs) та
Стабілізатори електромережі (PSSs),
використовуються.
Оптимізація системи керування ексцитацією впливає на ефективність, стабільність і реакцію двигуна на змінювані навантаження, а також на його косинус фі.
Необхідна швидкість,
Характеристики моменту,
Вимоги до косинуса фі,
Ефективність, і
Здатність контролювати роботу двигуна
є важливими розглядами при виборі правильного синхронного двигуна.
Для вимірювання косинуса фі синхронного двигуна можуть бути використані аналізатори потужності (або) лічильники. Це важлива характеристика, яка показує, наскільки ефективно двигун перетворює електричну енергію на практичну роботу.
При синхронізації з однаковою частотою і фазою, синхронні двигуни можуть працювати паралельно з іншими синхронними двигунами (або) джерелами живлення.
Утримання синхронізму включає вирішення таких складностей, як зміни навантаження, трансіентні ситуації та ефективне регулювання системи ексцитації, щоб уникнути втрати синхронізму.
Інерція, здатність витримувати механічні навантаження та ефективність двигуна залежать від дизайну ротора та матеріалів. Часто використовуються матеріали з високою магнітною проникністю, щоб покращити продуктивність.

Ротори з постійними магнітами перевершують традиційні конструкції роторів за ефективністю, густотою потужності та, можливо, нижчими втратами, що призводить до покращення продуктивності двигуна.
На відміну від індукційних двигунів, які самостійно запускаються, синхронні двигуни часто потребують зовнішньої допомоги, такої як демпферні обмотки, пускові двигуни, (або) додаткові пристрої, щоб довести їх до синхронної швидкості перед підключенням до джерела живлення.
Крива момент-швидкість синхронного двигуна є відносно рівною при синхронній швидкості і швидко спадає при роботі нижче синхронної швидкості.
Він має сильний обертальний момент на номінальній швидкості, що робить його ідеальним для застосувань з постійною швидкістю.
Хоча асинхронні мотори можуть працювати на однофазному живленні, синхронні мотори потребують трифазного живлення через необхідність синхронізації з обертовим магнітним полем.
Системи охолодження, такі як повітряне (або) рідинне охолодження, встановлюються у синхронних моторах для вилучення тепла, що генерується під час роботи, забезпечуючи ідеальну температуру та запобігання перегріву.
Синхронні мотори можуть мати різні форми роторів, такі як
циліндричні ротори,
ротори з видіннями,
ротори з внутрішніми постійними магнітами (IPM),
кожен з них має свої властивості ефективності.
Для підтримки стабільності та контролю, система збудження, яка складається з обмоток поля (або) постійних магнітів, керується регулюванням струму збудження (або) сили магнітного поля.

Синхронні мотори можна побудувати таким чином, щоб вони витримували екстремальні умови, поєднуючи міцну конструкцію, ізоляцію та техніки захисту від середовища.
Правильна послідовність фаз є важливою для синхронізації багатьох моторів (або) підключення їх до джерела живлення, що гарантує їх обертання в бажаному напрямку без шкоди їх ефективності.
Синхронні мотори найкраще працюють при сталому навантаженні, але їхня ефективність може постраждати при змінному (або) коливливому навантаженні.
Так, у застосуваннях, які вимагають точного контролю швидкості та постійної обертальної швидкості, таких як точна механічна обробка (або) системи керування рухом, синхронні мотори є переваговими.
Хоча обидві працюють на синхронних швидкостях, ПМСМ мають постійні магніти, вбудовані у ротор, що забезпечує більшу ефективність і густоту моменту, ніж традиційні синхронні двигуни.
Формула для обчислення моменту в синхронному двигуні така:
Момент = Потужність (вати) / (2 x П x Швидкість)
Недостатнє збудження може призвести до зменшення виробництва потужності та перегріву, тоді як надмірне збудження може призвести до надмірної реактивної потужності і нестабільності двигуна.
Синхронні двигуни розроблені для роботи на синхронних швидкостях, і перевищення цієї швидкості може потребувати модифікацій або додаткового обладнання.
Фазовий кут між магнітними полями статора і ротора керує виробництвом моменту двигуна і впливає на його параметри роботи.
Вибір між синхронними і індукційними двигунами визначається факторами, такими як необхідна швидкість, характеристики моменту, потреби в керуванні та розгляд ефективності.
Для запобігання пошкодженню при аваріях, синхронні двигуни включають профілактичні заходи, такі як
Захист від надтоку струму,
Моніторинг температури,
Аналіз вібрації, та
Автоматичні системи зупинки.
Синхронні двигуни можна використовувати в системах регенеративного гальмування, які перетворюють механічну енергію на електричну, сповільнюючи або зупиняючи машини.
Заява: Поважайте оригінал, хороші статті варто поширити, у разі порушення авторських прав, будь ласка, зверніться для вилучення.









{kind=link}
{kind=link}