

Synkronimotori on vaihtovirtamotori, joka pyörii vakiohnoilla, jotka määräytyvät sähköntoimituksen taajuuden ja polttopainikkeiden mukaan. Synkronimotorit toimivat synkronisessa nopeudessa ilman liukumista, erottuen induktiomotorien tavasta.
Synkronimotorit käytetään monissa sovelluksissa, kuten
teollisuusajurit,
sähköntuotanto
synkroniset kondensaattorit tehokkuuden parantamiseksi, ja
tarkat liikuntajoitussysteemit.
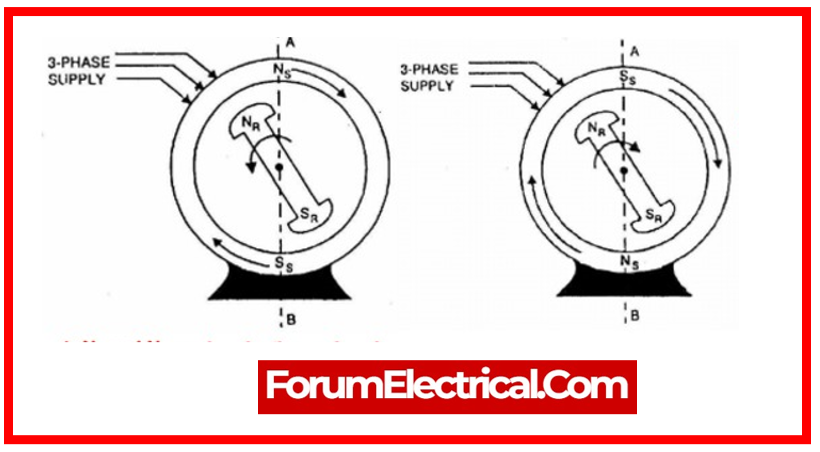
Synkronimotorit säilyttävät synkronisuuden, koska kierron (kierto) tapahtuu samalla nopeudella kuin statorin kiertävä magneettikenttä.

Synkronimotorin nopeus on suoraan verrannollinen sähköntoimituksen taajuuteen ja käänteisesti verrannollinen motorin polttopainikkeisiin.
Synkronimotorit, joilla on määritelty synkroninen nopeusominaisuus, ovat vähemmän tehokkaita kuin induktiomotorit, kun ne käsittelevät vaihtelevia kuormituksia.
Kun synkronimotori menettää synkronisuutensa sähköntoimituksen kanssa, se lopettaa tehokkaan toiminnan ja sitä voi tarvita uudelleen synkronoida ennen uudelleenkäynnistystä.
Apulaitteita, kuten demperipitoja (tai) käynnistysmotorit, käytetään usein synkronimotorien käynnistyksessä synkroniseen nopeuteen ennen synkronointia sähköntoimituksen kanssa.
Verrattuna induktiomotoriin synkronimotorit tarjoavat paremman
tehokkuuskorjauksen,
paremman tehokkuuden vakiohnoilla, ja
tarkan nopeusohjauksen.
Erilaisten nopeuksien ajamiseksi synkronimotorit tarvitsevat ulkoisia ohjausjärjestelmiä, kutentaajuuden muuttavia ohjauslaitteita (VFD).
Synkronimotori koostuu statorista, rotorista, herätejärjestelmästä ja joskus myös demperipitoista tai käynnistysmekanismista.
Herätejärjestelmä tuottaa magneettikenttän, jolla ruuvikierros voidaan antaa suoraan virtaa.
Tämä kenttä synkronoituu statorin kiertävän magneettikentän kanssa, mikä mahdollistaa motorin toiminnan synkronisessa nopeudessa.
Synkronimotorit, puolestaan, luottavat herätejärjestelmään, joka tuottaa magneettikentän, jota tarvitaan synkronisyyteen statorin kentän kanssa.
On olemassa kaksi tyyppiä:
DC-herätejärjestelmät – jotka käyttävät DC-sähköä rotorin voimaksi, ja
Pysyvien magneettien herätejärjestelmät – jotka käyttävät pysyviä magneetteja rotorissa magneettikentän luomiseen.
Synkronimotorit voivat muuttaa tehoastettaan herätevirtauksen säädöllä.
Motorin tehoaste voidaan parantaa tai korjata herätevirtauksen muuttamisella.
Demperipitot auttavat motoria käynnistyessä sallimalla hieman liukumista ennen synkronisen nopeuden saavuttamista.
Ne myös edistävät motorin vakautta odottamattomissa kuormituksen vaihteluissa.

Synkronimotorit toimivat yleensä synkronisissa nopeuksissa eivätkä ole parhaat ratkaisut sovelluksiin, jotka vaativat suuria kierrosmomentteja alhaisissa nopeuksissa, elleivät lisävarusteita (kuten väliajoja) tai muutoksia käytetä.
Synkronimotorien nopeuden ohjaus sisältää usein herätevirtauksen hallinnan (tai) sähköntoimituksen taajuuden muuttamisen taajuuden muuttavilla ohjauslaitteilla (VFD).
Synkroniset vastahakuismotorit käyttävät vastahakuismomentin periaatetta ja niissä on yksinkertaistettu rotorimuoto, jossa ei ole pitoja tai magneetteja. Ne voivat tarjota parempaa tehokkuutta ja yksinkertaisempaa rakennetta verrattuna perinteisiin synkronimotoriin.
Synkronimotorit, jotka kykenevät ylläpitämään synkronisuutta sähköntoimituksen kanssa, voivat toimia generaattoreina, kun ne pyörivät yli synkronisen nopeuden, muuttaen mekaanista energiaa sähköiseksi energiaksi.
Kaava synkroniselle nopeudelle on
Synkronimotorin nopeus (RPM) = (120 X Taajuus) / Polttopainikkeiden määrä
Synkronimotorin nopeus (RPM) = (120 X f)/P
Synkronimotorin polttopainikkeiden määrä määräytyy motorin suunnittelusta ja rakenteesta. Se on valmistajan määrittämä kiinteä ominaisuus.
Sovelluksissa, jotka vaativat vakiohnoja ja erinomaista tehokkuutta, kuten
teollisuuspumpit,
kompressori, tuuletin, ja
tietynlainen teollinen koneisto,
synkronimotorit
valitaan.
Kuorman kulma on statorin ja rotorin magneettikenttien välisen kulmakulman erotus.
Oikean kuorman kulman säätö on keskeistä motorin tehokkuudelle ja synkronisuudelle.
Synkronimotorit, tunnettu nimellä synkroniset kondensaattorit, voivat toimia ajaminen tilassa ja samalla tuottaa sähköä verkkoon generatoreina tietyissä olosuhteissa.
Hajaannuksen (tai) epävakauden vähentämiseksi synkronimotorissa käytetään useita ohjausjärjestelmiä ja vakauttavia teknologioita, kuten









{kind=link}