

ایک سینکرون موتر ایک AC موتر ہے جو برق کی فراہمی کی تعدد اور پول کی تعداد کے ذریعے متعین کردہ مستقل رفتار پر چلتا ہے۔ سینکرون موتروں کے برخلاف انڈکشن موتروں کی طرح، وہ سینکرون رفتار پر کسی بھی اسلپ کے بغیر کام کرتے ہیں۔
سینکرون موتروں کو مختلف کاموں میں استعمال کیا جاتا ہے، جن میں شامل ہیں
صنعتی ڈرائیوز،
برق کی پیداوار،
پاور فیکٹر کوریکشن سینکرون کنڈینسرز، اور
صحت مند محرک نظام۔
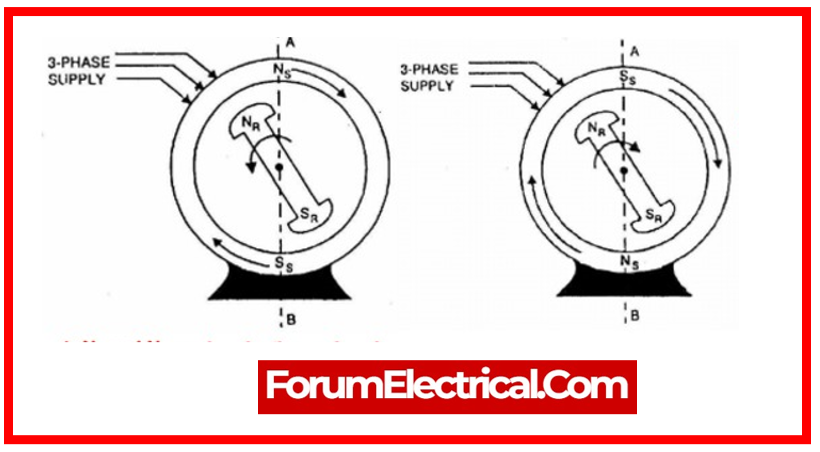
سینکرون موتروں کا سینکرونزم برقرار رہتا ہے کیونکہ روتر (گردش) اسٹیٹر کے گردش کرنے والے مغناطیسی میدان کے ساتھ یکساں شرح سے گردش کرتا ہے۔

سینکرون موتر کی رفتار برق کی فراہمی کی تعدد کے تناسب میں ہوتی ہے اور موتر کے پولز کی تعداد کے معکوس تناسب میں ہوتی ہے۔
سینکرون موتروں کی وجہ سے نصابی سینکرون رفتار کی خصوصیات کی بناء پر، وہ انڈکشن موتروں کے مقابلے میں متغیر لوڈ کے مقابلے میں کم کارآمد ہوتے ہیں۔
جب سینکرون موتر برق کی فراہمی کے ساتھ سینکرونزم کھو دیتا ہے، تو یہ موثر طور پر کام کرنے کا بندہ ہوجاتا ہے اور اسے پھر سے شروع کرنے سے پہلے پھر سے سینکرون کرنے کی ضرورت پڑ سکتی ہے۔
عام طور پر ڈیمپر واائنڈنگز (یا) شروع کرنے کے موتروں جیسے معاون آلات کا استعمال کیا جاتا ہے تاکہ سینکرون موتروں کو برق کی فراہمی سے سینکرون ہونے سے پہلے سینکرون رفتار تک لے جاسکے۔
انڈکشن موتروں کے مقابلے میں، سینکرون موتروں میں زیادہ
پاور فیکٹر کوریکشن،
مستقل لوڈ کے تحت زیادہ کارآمدی، اور
صحت مند رفتار کنٹرول۔
متغیر رفتاروں پر کام کرنے کے لئے، سینکرون موتروں کو مثلاً متغیر تعدد کے ڈرائیوز (VFDs) جیسے بیرونی کنٹرول نظام کی ضرورت ہوتی ہے۔
ایک سینکرون موتر ایسٹیٹر، روتر، ایکسائٹیشن نظام، اور کچھ حالتوں میں ڈیمپر واائنڈنگ یا شروع کرنے کے آلات سے ملکٹا ہے۔
ایکسائٹیشن نظام روتر واائنڈنگز کو مثبت جاریہ فراہم کرتے ہوئے ایک مغناطیسی میدان تیار کرتا ہے۔
یہ میدان اسٹیٹر کے گردش کرنے والے مغناطیسی میدان کے ساتھ سنکرون ہوتا ہے، جس سے موتر کو سینکرون رفتار پر کام کرنے کی اجازت ملتی ہے۔
سینکرون موتروں کو ایکسائٹیشن نظام پر انحصار ہوتا ہے تاکہ اسٹیٹر کے میدان کے ساتھ سنکرون ہونے کے لئے مطلوبہ مغناطیسی میدان فراہم کیا جا سکے۔
دو قسمیں ہیں:
DC ایکسائٹیشن نظام - جو DC طاقت کو روتر کو چلانے کے لئے استعمال کرتا ہے، اور
مقعدی مغناطیسی ایکسائٹیشن نظام - جو روتر میں مقعدی مغناطیسوں کا استعمال کرتا ہے تاکہ مغناطیسی میدان تیار کیا جا سکے۔
سینکرون موتروں کو ایکسائٹیشن کرنٹ کو تبدیل کرتے ہوئے اپنے پاور فیکٹر کو تبدیل کرنے کی صلاحیت ہوتی ہے۔
موٹر کا پاور فیکٹر ایکسائٹیشن کو تبدیل کرتے ہوئے بہتر یا صحیح کیا جا سکتا ہے۔
ڈیمپر واائنڈنگ موتر کو شروع کرنے میں مدد کرتا ہے کیونکہ یہ سینکرون رفتار پر پہنچنے سے پہلے کچھ ابتدائی اسلپ کی اجازت دیتا ہے۔
یہ موتر کی ثبات کو غیر متوقع لوڈ کے تلناتوں کے دوران محفوظ رکھنے میں بھی مدد کرتا ہے۔

سینکرون موتروں عام طور پر سینکرون رفتار پر کام کرتے ہیں اور اضافی گیئرنگ (یا) تبدیلیوں کے بغیر کم رفتار کی درخواستوں کے لئے زیادہ ٹارک کے لئے بہترین حل نہیں ہوسکتے ہیں۔
سینکرون موتروں میں، رفتار کا کنٹرول عام طور پر ایکسائٹیشن کو کنٹرول کرتے ہوئے یا متغیر تعدد کے ڈرائیوز (VFDs) کے ذریعے برق کی فراہمی کی تعدد کو تبدیل کرتے ہوئے کیا جاتا ہے۔
سینکرون ریلکٹنس موتروں کو ریلکٹنس ٹارک کے مبدأ کا استعمال کرتے ہیں اور ایک سادہ روتر کی شکل کے ساتھ واائنڈنگ یا مغناطیسوں کے بغیر ہوتے ہیں۔ روایتی سینکرون موتروں کے مقابلے میں، ان کے پاس زیادہ کارآمدی اور آسان تعمیر کی امکان ہوتی ہے۔
سینکرون موتروں کو برق کی فراہمی کے ساتھ سینکرون ہونے کی صلاحیت کی وجہ سے، سینکرون رفتار سے اوپر کام کرنے والے موتروں کو جنریٹرز کے طور پر کام کرنے کی صلاحیت ہوتی ہے، جو مکینکل طاقت کو برقی طاقت میں تبدیل کرتے ہیں۔
سینکرون رفتار کے لئے RPM کا فارمولا ہے
سینکرون موتر کی رفتار (RPM) = (120 X تعدد) / پولز کی تعداد
سینکرون موتر کی رفتار (RPM) = (120 X f)/P
سینکرون موتر میں پولز کی تعداد موتر کی ڈیزائن اور تعمیر کے ذریعے مقرر ہوتی ہے۔ یہ مصنوع کی جانب سے مقرر کردہ ایک متعین شدہ خصوصیت ہے۔









{kind=link}