

Động cơ đồng bộ là một động cơ AC chạy ở tốc độ không đổi được chỉ định bởi tần số nguồn điện và số cực. Khác với động cơ cảm ứng, động cơ đồng bộ hoạt động ở tốc độ đồng bộ mà không có trượt.
Động cơ đồng bộ được sử dụng trong nhiều ứng dụng, bao gồm
Động cơ công nghiệp,
Tạo điện
Bù hệ số công suất bằng máy đồng bộ ngưng tụ, và
Hệ thống kiểm soát chuyển động chính xác.
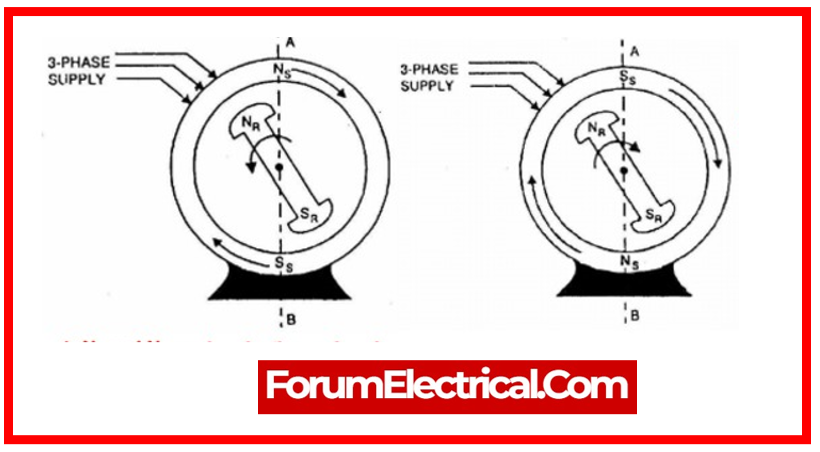
Động cơ đồng bộ duy trì sự đồng bộ vì rotor quay (quay) với cùng tốc độ với từ trường quay của stator.

Tốc độ của động cơ đồng bộ tỷ lệ thuận với tần số nguồn điện và ngược lại tỷ lệ với số cực của động cơ.
Do đặc tính tốc độ đồng bộ cố định, động cơ đồng bộ ít hiệu quả hơn khi xử lý tải thay đổi so với động cơ cảm ứng.
Khi động cơ đồng bộ mất đồng bộ với nguồn điện, nó ngừng hoạt động hiệu quả và có thể cần phải được đồng bộ lại trước khi khởi động lại.
Các thiết bị phụ trợ như cuộn dây giảm chấn (hoặc) động cơ khởi động thường được sử dụng để đưa động cơ đồng bộ lên tốc độ đồng bộ trước khi đồng bộ với nguồn điện.
So với động cơ cảm ứng, động cơ đồng bộ cung cấp
Hiệu chỉnh hệ số công suất tốt hơn,
Hiệu suất cao hơn dưới tải ổn định, và
Kiểm soát tốc độ chính xác.
Để chạy ở các tốc độ khác nhau, động cơ đồng bộ cần các hệ thống điều khiển bên ngoài nhưbiến tần (VFDs).
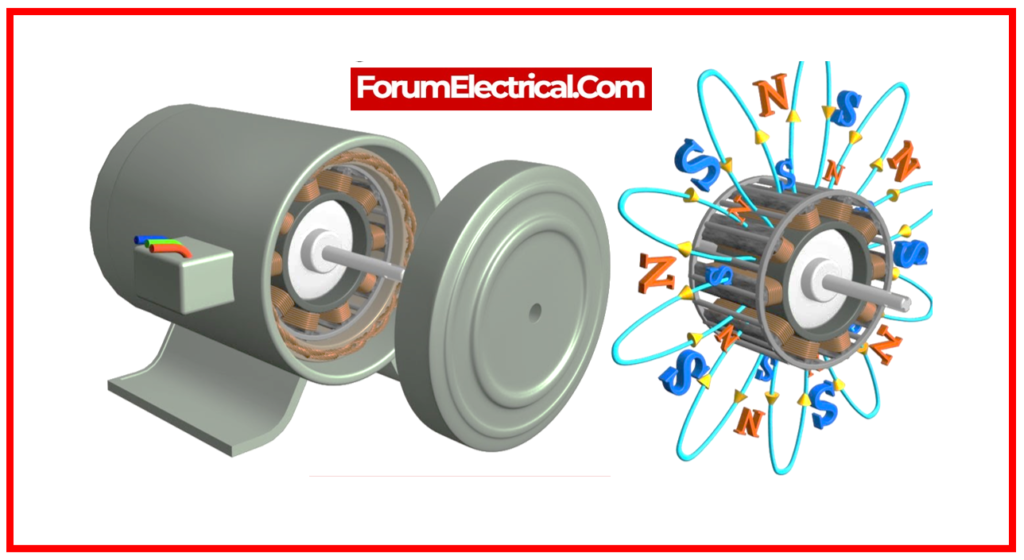
Động cơ đồng bộ bao gồm stator, rotor, hệ thống kích từ, và trong một số trường hợp, cuộn dây giảm chấn hoặc cơ chế khởi động.
Hệ thống kích từ tạo ra từ trường bằng cách cung cấp dòng điện một chiều cho cuộn dây rotor.
Từ trường này đồng bộ với từ trường quay của stator, cho phép động cơ chạy ở tốc độ đồng bộ.
Ngược lại, động cơ đồng bộ phụ thuộc vào hệ thống kích từ để cung cấp từ trường cần thiết cho sự đồng bộ với từ trường stator.
Có hai loại:
Hệ thống kích từ DC – sử dụng nguồn điện DC để cung cấp cho rotor, và
Hệ thống kích từ nam châm vĩnh cửu – sử dụng nam châm vĩnh cửu trong rotor để tạo từ trường.
Bằng cách điều chỉnh dòng điện kích từ, động cơ đồng bộ có thể thay đổi hệ số công suất của mình.
Hệ số công suất của động cơ có thể được cải thiện hoặc hiệu chỉnh bằng cách thay đổi kích từ.
Cuộn dây giảm chấn giúp động cơ khởi động bằng cách cho phép có một chút trượt ban đầu trước khi đạt đến tốc độ đồng bộ.
Nó cũng giúp ổn định động cơ trong các tình huống tải bất ngờ.

Động cơ đồng bộ thường hoạt động ở tốc độ đồng bộ và có thể không phải là giải pháp tốt nhất cho các ứng dụng yêu cầu mô-men xoắn lớn ở tốc độ thấp, trừ khi sử dụng thêm bánh răng (hoặc) sửa đổi.
Trong động cơ đồng bộ, việc điều khiển tốc độ thường liên quan đến quản lý kích từ (hoặc) thay đổi tần số của nguồn điện thông qua biến tần (VFDs).
Động cơ đồng bộ phản từ sử dụng nguyên tắc mô-men phản từ và có hình dạng rotor đơn giản hơn, không có cuộn dây hoặc nam châm. So với động cơ đồng bộ thông thường, chúng có tiềm năng hiệu suất cao hơn và cấu trúc đơn giản hơn.
Nhờ khả năng duy trì sự đồng bộ với nguồn điện, động cơ đồng bộ hoạt động ở tốc độ cao hơn tốc độ đồng bộ có thể hoạt động như máy phát, chuyển đổi năng lượng cơ thành năng lượng điện.
Công thức tính tốc độ đồng bộ theo vòng/phút là
Tốc độ đồng bộ (RPM) = (120 x Tần số) / Số cực
Tốc độ đồng bộ (RPM) = (120 x f)/P
Số cực trong động cơ đồng bộ được quy định bởi thiết kế và cấu trúc của động cơ. Đây là một đặc điểm cố định do nhà sản xuất chỉ định.


扭矩 = 功率 (瓦特) / (2 × π × 速度)
### 45. 欠励磁和过励磁对同步电机有什么影响? 欠励磁可能导致功率输出减少和过热,而过励磁可能导致过多的无功功率和电机不稳定。 ### 46. 同步电机能否在超过其同步速度的速度下运行? 同步电机设计为以同步速度运行,超过该速度可能需要修改或额外设备。 ### 47. 相角为何影响同步电机的性能? 定子和转子磁场之间的相角决定了电机的扭矩产生,并影响其运行参数。 ### 48. 在特定应用中选择同步电机而非感应电机的因素有哪些? 选择同步电机还是感应电机取决于所需速度、扭矩特性、控制需求和效率考虑等因素。 ### 49. 为什么在运行过程中要保护同步电机免受缺陷或异常的影响? 为了防止故障期间损坏,同步电机采用了预防措施,如: - 过流保护 - 温度监测 - 振动分析 - 自动停机系统 ### 50. 同步电机能否用于再生制动? 同步电机可以用于再生制动系统,这些系统在减慢或停止机械时将机械能转化为电能。声明:尊重原文,好文章值得分享,如有侵权请联系删除。
【注意事项】 - 严格按照语种翻译要求的书写体进行翻译输出。 - 若是没有语种书写体要求,且存在多种书写体的语种,则按目标语种的书写体输出使用人数最多的字体输出,若是有字体差不多选择最为官方权威的标准书写体进行翻译输出。 - 禁止出现任何解释说明,只输出最终翻译结果,不得多语种混合









{kind=link}
{kind=link}