

Sinkrona motoro estas CA-motoro, kiu funkcias je konstanta rapido, difinita per la frekvenco de la energofonto kaj la nombro da polusoj. Sinkronaj motoroj, malsame ol induktaj motoroj, funkcias je sinkrona rapido sen glitado.
Sinkronaj motoroj estas uzataj en diversaj aplikacioj, inkluzive
Industriaj drivi,
Energoprodukto
Sinkronaj kondensiloj por potenca faktoro-korektado, kaj
Precizaj movokontrolsistemoj.
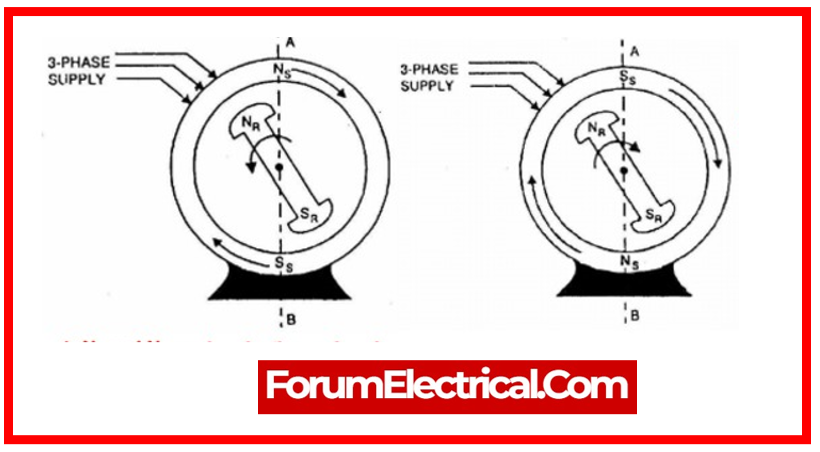
Sinkronaj motoroj daŭrigas sinkronon, ĉar la rotorotacas (rotacio) je la sama rapido kiel la rotacia magnetkampo de la statoro.

La rapido de sinkrona motoro estas proporcia al la frekvenco de la energofonto kaj inverse proporcia al la nombro da polusoj en la motoro.
Pro iliaj fiksaj sinkronaj rapido karakterizoj, sinkronaj motoroj restas malpli efikaj je traktado de variablaj ŝarĝoj ol induktaj motoroj.
Kiam sinkrona motoro perdas sinkronon kun la energofonto, ĝi cesis efike funkciadi kaj povas esti necese re-sinkronigi ĝin antaŭ restartigo.
Auxiliarecaj aparatoj, kiel amortigaj viklingoj (aŭ) komencaj motoroj, estas ofte uzataj por igi sinkronajn motorojn atingi sinkronan rapidon antaŭ sinkronigo kun la energofonto.
Kompare al induktaj motoroj, sinkronaj motoroj proponas pli grandan
Potenca faktoro-korektadon,
Pli altan efikecon sub konstanta ŝarĝo, kaj
Precizan rapidkontrolon.
Por funkciadi je diversaj rapidecoj, sinkronaj motoroj bezonas eksterajn kontrolsistemojn, kiel variabla frekvenco-dirigiloj (VFD).
Sinkrona motoro konsistas el statoro, rotor, ekscita sistemo, kaj, en certaj kondiĉoj, amortiga viklingo aŭ komencmeĥanismo.
La ekscita sistemo generas magnetkampon per provizado de rekta strumo al la rotorviklingoj.
Ĉi tiu kampo sinkroniĝas kun la rotacia magnetkampo de la statoro, permesante al la motoro funkciadi je sinkrona rapido.
Sinkronaj motoroj, aliflanke, dependas de la ekscita sistemo por provizi la magnetkampon necesan por sinkrono kun la kampo de la statoro.
Estas du tipoj:
DC-ekscitaj sistemoj – kiuj uzas DC-strumon por povigi la rotoron, kaj
Permanentmagnetaj ekscitaj sistemoj – kiuj uzas permanentajn magnetojn en la rotoron por generi la magnetkampon.
Regulante la ekscitan strumon, sinkronaj motoroj povas modifi sian potencan faktoron.
La potenca faktoro de la motoro povas esti plibonigita aŭ korektita per ŝanĝo de la ekscito.
La amortiga viklingo helpas la motoron komenci per permesado de iom da frua glitado antaŭ atingi sinkronan rapidon.
Ĝi ankaŭ helpas en la stabileco de la motoro dum neatenditaj ŝarĝfluktuoj.

Sinkronaj motoroj kutime funkcias je sinkronaj rapidoj kaj povas ne esti la plej bona solvo por aplikaĵoj postulantaj altan momenton je malrapida rapideco, escepte se estas uzataj aldonaĵoj (aŭ) modifoj.
En sinkronaj motoroj, la regado de rapido ofte implicas la kontrolo de la ekscito (aŭ) la ŝanĝo de la frekvenco de la energofonto per variabla frekvenco-dirigiloj (VFD).
Sinkronaj reluctancmotoroj uzas la principon de reluctancmomanto kaj havas simpligitan formon de rotoron sen viklingoj aŭ magnetoj. Kompare al tradiciaj sinkronaj motoroj, ili havas potencialon por pli alta efikeco kaj pli simpla konstruo.
Pro sia kapablo daŭrigi sinkronon kun la energofonto, sinkronaj motoroj, funkciantaj supere de sinkrona rapido, povas agi kiel generatoroj, transformante la mekanikan energion en elektran energion.
La formulo por sinkrona rapido (RPM) estas
Sinkrona Motorrapido (RPM) = (120 X Frekvenco) / Nombro da Polusoj
Sinkrona Motorrapido (RPM) = (120 X f)/P
La nombro da polusoj en sinkrona motoro estas determinita de la dizajno kaj konstruo de la motoro. Ĝi estas fiksita trajto, kiun specifas la produtanto.
En aplikaĵoj postulantaj konstantan rapidon kaj altan efikecon, kiel
Industriaj pompoj,
Kompresiloj, ventiloj, kaj
Certaj tipoj de industria maŝinerio,
Sinkronaj motoroj
estas elektitaj.
La ŝarĝangulo estas la angula diferenco inter la magnetkampos de la statoro kaj la rotor.
Konvena regado de la ŝarĝangulo estas grava por la efikeco kaj sinkrono de la motoro.
Sinkronaj motoroj, sciitaj kiel sinkronaj kondensiloj, povas funkcii en drivanta reĝimo kaj ankaŭ generi elektran energion al la reto kiel generatoroj en specifaj kondiĉoj.
Por redukti la huntadon aŭ instablecon en sinkronaj motoroj, varias kontrolsistemoj kaj stabiligaj teknologioj, kiel
Aŭtomataj Voltagereguliloj (AVR) kaj
Sistemoj por Stabiligo de Energisistemo (PSS),
estas uzataj.









{kind=link}