

Sinkroonmootor on AC-mootor, mis töötab kindlal kiirusel, mida määrab elektrivari frekvents ja poolte arv. Sinkroonmootorid, vastupidiselt induktiivsetele mootoritele, töötavad sinkroonkiirusel ilma lõkkega.
Sinkroonmootorid kasutatakse mitmesugustes rakendustes, sealhulgas
Tööstuslikud tahvelid,
Elektri tootmine
Võimsuse teguriga seotud sinkroonkondensaatorid ja
Täpsete liigutuskontrollisüsteemide jaoks.
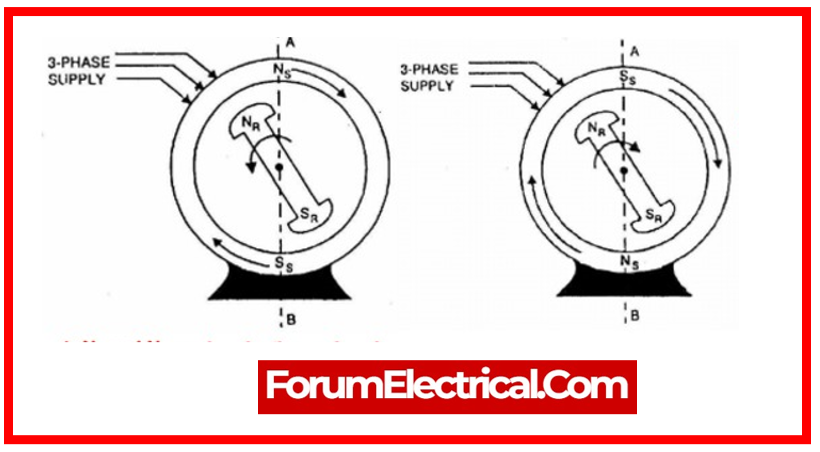
Sinkroonmootorid säilitavad sinkroonsust, kuna rootor pöörleb (pööre) sama kiirusega nagu statori pöördeline magneettväli.

Sinkroonmootori kiirus on proportsionaalne elektrivari allika sagedusega ja vasteproportsionaalne mootori pooltide arvuga.
Nende kindla sinkroonkiiruse omaduste tõttu on sinkroonmootorid vähem efektiivsed muutuvate laaste käsitlemisel kui induktiivsed mootorid.
Kui sinkroonmootor kaotab sinkroonsuse elektrivari allikaga, siis see lõpetab efektiivse töö ja seda võib enne uuesti käivitamist uuesti sinkroniseerida.
Sinkroonmootorid saavutavad sinkroonkiiruse tavaliselt abilahenduste, näiteks demperkitte (või) käivitamismootorite, abil enne sinkroniseerimist elektrivari allikaga.
Induktiivsete mootorite suhtes pakuvad sinkroonmootorid paremat
Võimsuse teguri parandamist,
Suuremat efektiivsust konstantsete laaste korral ja
Täpset kiiruse kontrolli.
Erinevate kiiruste korral nõuavad sinkroonmootorid väliseid juhtimissüsteeme, näiteks sageduse reguleerimisjuhid (VFD).
Sinkroonmootor koosneb statorist, rotorist, eksitussüsteemist ja mõnes olukorras demperkittest või käivitamismehhanismist.
Eksitussüsteem genereerib magneettväli, andes otsese voolu rotorikihtidele.
See väli sinkroniseerub statori pöördelise magneettväljaga, lubades mootoril töötada sinkroonkiirusega.
Sinkroonmootorid, teisalt, sõltuvad eksitussüsteemist, et luua magneettväli, mis on vajalik sinkroniseerimiseks statori väljaga.
On kaks tüüpi:
DC eksitussüsteemid – mis kasutavad DC-voolu rotorikihtidele ja
Püsikogumagnetiline eksitus – mis kasutab rotoris pusikogumagneete magneettväli loomiseks.
Sinkroonmootorid saavad oma võimsuse tegurit muuta eksituse voolu kaudu.
Mootori võimsuse tegurit saab parandada või korrigeerida eksituse muutmisega.
Demperkitte aitab mootoril käivituda, lubades algsest lõkke enne sinkroonkiiruse saavutamist.
See aitab ka mootori stabiilsuses ootamatute laastemüra korral.

Sinkroonmootorid tavaliselt töötavad sinkroonkiirustel ja võivad mitte olla parim lahendus rakendustele, mis nõuavad suurt jõudu madalatel kiirustel, välja arvatud juhul, kui kasutatakse lisavarustust (või) muudatusi.
Sinkroonmootorites hõlmab kiiruse reguleerimine sageli eksituse juhtimist (või) elektrivari allika sageduse muutmist variabelsageduse juhtimisjuhiste (VFD) kaudu.
Sinkroonreluktiivsed mootorid kasutavad reluktiivtorque'i printsiipi ja omavad lihtsustatud rotorikujundust ilma kitteid või magnete. Neil võib olla parem efektiivsus ja lihtsam ehitus traditsiooniliste sinkroonmootorite suhtes.
Sinkroonmootorid, nende võime täita sinkroonsust elektrivari allikaga, võivad ületades sinkroonkiirust töötada generaatorina, teisendades mehaanilist energiat elektriliseks energiaks.
Sinkroonkiiruse RPM valem on
Sinkroonmootori Kiirus (RPM) = (120 X Sagedus) / Poolte Arv
Sinkroonmootori Kiirus (RPM) = (120 X f)/P
Sinkroonmootori pooltide arv määratakse mootori disaini ja ehituse kaudu. See on valmistaja poolt määratud fikseeritud omadus.
Rakendustes, mis nõuavad konstantset kiirust ja head efektiivsust, nagu
Tööstuslikud pompid,
Kompressoorid, ventilad ja
Mõned tüübid tööstuslikke masinaid,
Sinkroonmootorid
valitakse.
Laastekulm on statori ja rotorite magneettväljade vaheline nurk.
Laastekulma õige reguleerimine on kriitiline mootori efektiivsuse ja sinkroniseerimise jaoks.
Sinkroonmootorid, tuntud kui sinkroonkondensaatorid, võivad töötada juhtimisrežiimis ja samal ajal geneerida elektrit võrgule generaatorina teatud tingimustes.
Sinkroonmootorite hüpplemise või ebastabiilsuse vähendamiseks kasutatakse mitmeid juhtimissüsteeme ja stabiliseerimistehte, näiteks
Automaatsed voltagiregulaatorid (AVR) &
Energiasüsteemi stabilisaatorid (PSS),









{kind=link}