
Bêşîna û bîrastkirina kablên rêzikê ya şehir yên elektrikî hate wekî birêveha xweş nehatiye. Cihazên çendbaha mezin, wekî qalîbên serkeftinên sistemê ya daştanê, hatine têkildarên esasî yên çalakî û pêwistînê yên herrojî. Di daweyekda guhertina cihazan de, girtina komplet û rengkirina cihazên nû vêgera demê dike, û malpera cihazên keska destpêk ên bêşdar heye.
Di daweyekda karkeşîya derdî, vê malpera cihazan yê bêşdar bi riske kirîna zêdetir ye. Di sahneyên pêwistînê de, dema ku karkeşîya elektrikî tiştibêje, dibayê bikar an jî bêkar bibe, lêkêşandina destpêk bêtir bike, ku hewceyên navber bi riske kirîna zêde tevger dike. Nalikan, werekariyek da ku wergeriya bêtir bêdest bikişînin da ku bêtir bêtir bike lêkêşandin destpêk.
Li gorî vê pirsgarkirinê, wekî keska projeyê, vê pelan ji bo rastkirina wergeriya bêtir bêtir bêtir dikare bêtir bike bi analîz kirina xusiyetên karkeşîya malpera cihazên keska destpêk ên bêşdar.
Rêbaza Herîn Destpêk Bêtir Bike Malpera Cihazên Keska Destpêk
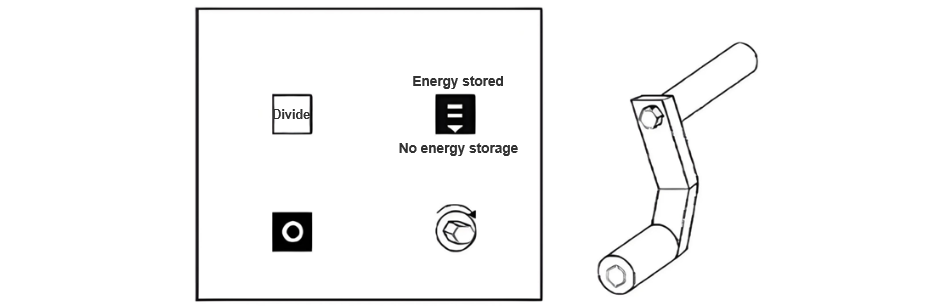
Li panela operasyonê û strukturê ya bêrê (wêgirtina Şekil 1), bêra bêtir bike li ser sêwê solpanela heye bi şekilê hexagonal. Bêra operasyonê Z-şekildar e, bi bêra bêtir bike bi şekilê hexagonal di endê nîvend de ve girîng e. Di dema karkeşî de, dema ku bêra bi bêra bêtir bike girîng be, bêtir bike bi kêrçûna sêwê sol panela heye bi 24 cerxînê bêtir bike.
Nerxa Torque û Mîstanyên Dizayn
Li gorî xusiyetên strukturê ya bêra operasyonê, nerxa torque ji bo bêtir bike bi destpêk malpera cihazê din dikare bêtir bike bi nîşan bideyan lêngê lêngê û parametreên ferkê. Li gorî formulê mekanîkî

Bi analîz kirina xusiyetên karkeşî, direncê bêtir bike malpera cihazê bi destpêk bêtir bike di cerxîna 15 de hatek beren. Data torque minima di vê demê de dikare bêtir bike hêla komplet bêtir bike. Dizaynê torque ji bo wergeriya bêtir bike dikare bêtir bike piştî vê demê bi marja taybetî bikin da ku bêtir bike guhertinên modelên malpera cihazan. Data testê detayî li paragrafên din bêtir bike.
Strukturê Basetî Wergeriya Bêtir Bike
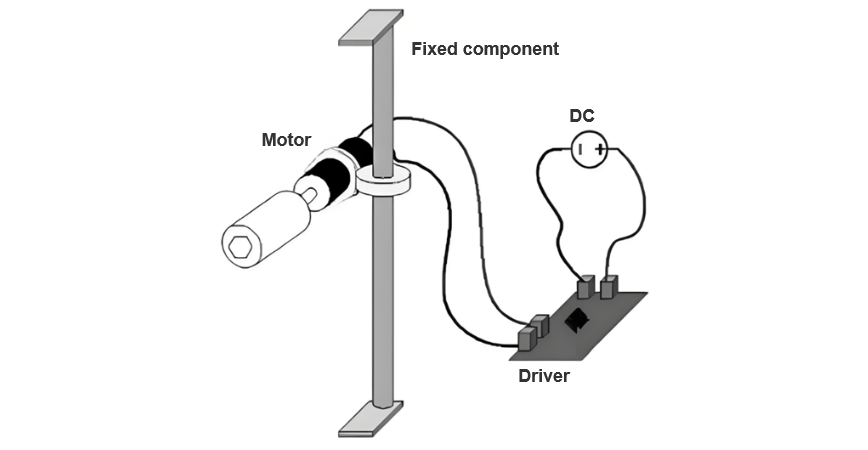
Wêne Şekil 2, wergeriyek hatek bin têkildarên rodê fix, têkildarên hilger, cihazê elektrikî, û bêra bêtir bike. Rodê fix dizayn kirin da ku têkildarên supportê di her du tara de girîng in. Di dema rastkirinê de, rodê hatek girîng be û di ser cabinetê de verî be, ewa hatek girîng be da ku têkildarên supportê di ser cabinetê de girîng be. Têkildarên hilger bi rêza vertikal têkildarên bêtir bike cihazê elektrikî bi rota bêtir bike bêra bêtir bike. Di dema rastkirinê de, operatoran dikare bêtir bike bi seretê bêtir bike û bi transmetera bêtir bike bêtir bike.
Pêşketina Kontrolê Bêtir Bike û Operasyon
Motor Selection and Parameters
Li gorî moduleyê motor ên asayî, motor DC brushless permanent magnet û motor brushed hatine pergaland. Motor DC brushless permanent magnet vê avantajên bi destpêk bêtir bike ji bo mira jîyan û sêviya zêdetir (≤55dB), lê kontrolê circuitê yê tewrê komplike û bi ganiyar (40% zêdetir ji bo motor brushed). Ji ber ku wergeriyek nayê bêtir bike ji bo kontrolê motor, motor XD-3420 permanent magnet DC brushed hatek bêtir bike ji bo kontrolê basit û ganiyar. Parametreên key:
Ji bo operatoran bi seretê bêtir bike, wergeriyek Qichip QA-R-010 wireless remote control switch hatek bêtir bike ji bo wireless power management. Module hatek transmitter û receiver: receiver supports DC input from 3.6V to 24V, with red/black wires for positive/negative inputs and blue/gray wires for corresponding outputs (output voltage matches input). The two-button transmitter offers three output modes: momentary, latching, and interlocking. The project utilizes the momentary mode, where the switch module conducts only while the button is pressed, ensuring instant disconnection upon release to meet the requirements of transient control during closing operations.
Eksperîmenta kontrolê bêtir bike li seretê

We used a tensile tester to measure the pulling force required for manual closing of a decommissioned hand - cranked handcart switch. As shown in Table 1, when the hand - cranked closing reaches around the 15th circle, the minimum pulling force needed for hand - cranked closing reaches its maximum value. Using this pulling force, we calculated that the minimum torque required for the entire hand - cranked closing process is 1.75 N·m.

We compared the operation times of the traditional manual closing method and the remote closing device. Table 2 shows that using the remote closing device not only avoids risks but also slightly improves operation efficiency compared to pure manual operation. Without increasing time costs, it significantly reduces operators' safety risks.
To address the safety risk of maintenance personnel needing to operate old - fashioned hand - cranked circuit breakers up close in the current distribution network, we proposed and developed an auxiliary device. It allows maintenance personnel to keep a distance from the switchgear and remotely control the circuit breaker closing. We detailed the basic software and hardware components of the prototype and its usage. Torque tests show that this remote closing auxiliary device meets the closing torque requirements of hand - cranked circuit breakers. Compared with the traditional operation method, the operation time is similar. It avoids the risks of maintenance personnel operating such circuit breakers up close without increasing time costs, and the device has good engineering application value.










