
Քաղաքացի էլեկտրաէներգետիկ ցանցի կապույտների և հիմնական սարքավորումների հեռացումը դարձել է բաշխող ցանցի շինարարության չհակառակելի հորիզոնտ։ Բարձր լարման սարքավորումը, որպես բաշխող համակարգի կորին սարքավորում, դարձել է սարքավորումների օրենական աշխատանքների և ծառայության հիմնական օբյեկտը։ Սարքավորումների իտերացիայի ընթացքում նոր սարքավորումների լրիվ փոխարինումը և ներկայացումը պարունակում է երկար ցիկլ, և հին ձեռքով սեղմվող բարձր լարման սարքավորումը դեռ օգտագործման մեջ է։
Որոշակի ժամկետում աշխատանքի պատճառով այդ սարքավորումը կարող է ստեղծել անհատական ռիսկեր սեղմման և բացման գործողությունների ընթացքում։ Աշխատանքային պայմաններում, երբ էլեկտրական գործողությունը ձեռք չի գալիս, պետք է կատարել ձեռնավոր սեղմում, որը կարող է անմիջապես հանգեցնել անհատական ռիսկերին սեղմման ընթացքում։ Այդ պատճառով կարևոր է զգուշացնել հեռավոր սեղմման սարքի զարգացումը որպես առաջադեմ անվտանգության միջոց սարքավորումների նորացման ընթացքում։
Այս հարցի վրա կենտրոնացնելով, որպես պրոյեկտի մասնակից, այս հոդվածը նախագծում է հեռավոր սեղմման գործողության սարք, վերլուծելով հին ձեռքով սեղմվող կողմնակից սարքավորումների գործողության հատկությունները, որպեսզի կրկնակի անվտանգության ռիսկերը ձեռնավոր գործողությունների ընթացքում։
Ձեռնավոր սեղմման սովորական մեթոդը կողմնակից սարքավորումներում
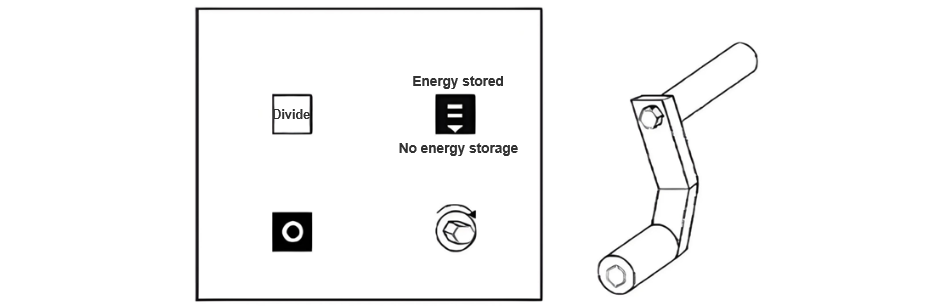
Կողմնակից սարքավորումների (տես նկ. 1) գործակալության պանելու և կողմնակից կառուցվածքում ձեռնավոր սեղմման պտտվող սունիքը գտնվում է պանելի ձախ կողմում կանոնավոր վեցանկյունաձև հատույթով։ Գործակալության ձեռնարկը Z-ձև է, որը կապված է պտտվող սունիքին կանոնավոր վեցանկյունաձև կողմնակից սուլով ներքևի կողմում կապող կապով։ Գործողության ընթացքում, երբ ձեռնարկը ներքրում են պտտվող սունիքում, վերևի կողմով ժամսլաքի ուղղությամբ մոտ 24 շրջան պտտումը ավարտում է սարքավորումը սեղմելու գործողությունը։
Մոմենտի հաշվարկի հիմքը և նախագծման սահմանաչափերը
Կողմնակից գործակալության կառուցվածքային հատկությունների հիման վրա կարող է հաշվարկվել սարքավորումը ձեռնավոր սեղմման համար պահանջվող մոմենտը որոշելով ուժի համար պահանջվող հեռավորության և կանգնած ուժի պարամետրերը։ Մեխանիկական բանաձևի հիման վրա

Գործակալության հատկությունների վերլուծության ընթացքում հաստատվում է, որ ձեռնավոր գործանցող սարքավորումը հասնում է մաքսիմալ պտտման դիմադրության 15-րդ շրջանում։ Այդ պահի նվազագույն մոմենտի տվյալները կարող են ծածկել ամբողջ սեղմման գործողությունը։ Հեռավոր սեղմման սարքի մոմենտի նախագծման պետք է գերազանցել այս կրիտիկական արժեքը անվտանգության մարգինով, որպեսզի կարողանա առաջարկել տարբեր սարքավորումների մոդելների մոմենտի փոփոխությունները։ Մանրամասն փորձարկման տվյալները կներկայացվեն հետագա բաժներում։
Հեռավոր սեղմման սարքի հիմնական կառուցվածք
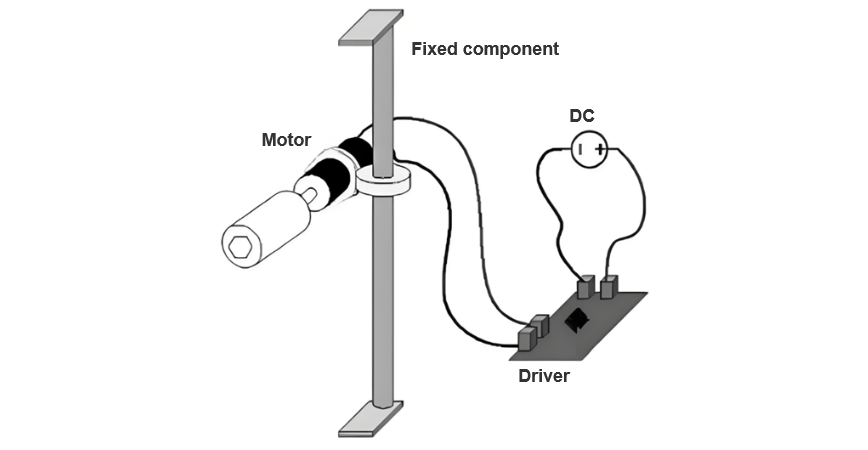
Նկ. 2-ում ցուցադրված սարքը բաղկացած է ֆիքսված սունիքից, շարժվող կազմակերպիչներից, էլեկտրական սարքից և սեղմման կապից։ Ֆիքսված սունիքը նախագծված է կարճացնելու համար, որը ունի երկու կողմերում կապակցված համար աջակցող սալեր։ Įстановке сначала укорачивают стержень и вертикально вставляют его в шкаф, затем удлиняют до тех пор, пока опорные пластины не упрются в шкаф для горизонтальной фиксации. Шарнирные компоненты регулируются по вертикали, чтобы соединительный узел электрического устройства совпадал с вращающейся головкой выдвижного выключателя. После настройки операторы могут отойти в безопасную зону и отправить сигнал по часовой стрелке через удаленный передатчик для выполнения операции закрытия.
Реализация дистанционного управления и эксплуатации
Выбор двигателя и параметры
При выборе основного модуля двигателя были сравнены постоянные магнитные бесщеточные двигатели постоянного тока и щеточные двигатели. Бесщеточные двигатели имеют значительные преимущества по сроку службы и уровню шума (≤55дБ), но имеют сложные схемы управления и более высокую стоимость (на 40% выше, чем у щеточных). Учитывая непритязательные требования к управлению двигателем, был выбран постоянный магнитный двигатель постоянного тока с щетками XD-3420 за простоту управления и низкую стоимость. Основные параметры:
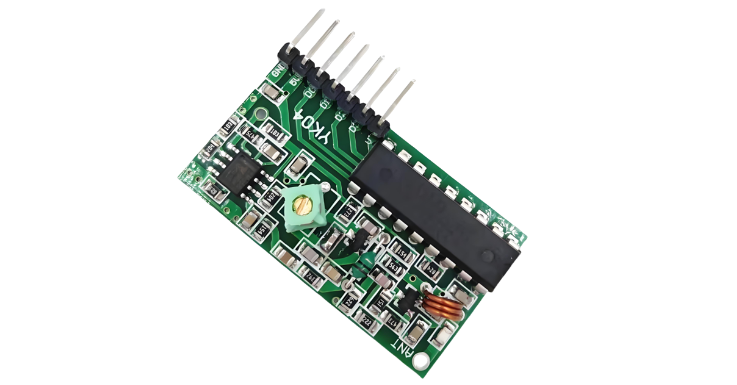
Для того чтобы персонал мог работать на безопасном расстоянии, устройство использует беспроводной пульт дистанционного управления Qichip QA-R-010 для беспроводного управления питанием. Модуль состоит из передатчика и приемника: приемник поддерживает вход постоянного тока от 3,6В до 24В, красный/черный провода для положительного/отрицательного входа, синий/серый провода для соответствующих выходов (выходное напряжение соответствует входному). Двухкнопочный передатчик предлагает три режима выхода: импульсный, защелкивающийся и взаимозависимый. В проекте используется импульсный режим, при котором модуль переключателя проводит только при нажатии кнопки, обеспечивая немедленное отключение при ее отпускании, что соответствует требованиям кратковременного управления при операциях закрытия.
Полевые испытания дистанционного управления

Мы использовали тензометр для измерения силы, необходимой для ручного закрытия выведенного из эксплуатации ручного выдвижного выключателя. Как показано в таблице 1, когда ручное закрытие достигает примерно 15-го оборота, минимальная сила, необходимая для ручного закрытия, достигает максимального значения. Используя эту силу, мы рассчитали, что минимальный момент, необходимый для всего процесса ручного закрытия, составляет 1,75 Н·м.

Мы сравнили время операций традиционного ручного закрытия и устройства дистанционного закрытия. Таблица 2 показывает, что использование устройства дистанционного закрытия не только снижает риски, но и немного повышает эффективность операций по сравнению с чисто ручным управлением. Без увеличения временных затрат значительно снижаются риски для операторов.
Для решения проблемы безопасности, связанной с необходимостью обслуживания старых ручных выключателей, мы предложили и разработали вспомогательное устройство. Оно позволяет персоналу находиться на расстоянии от оборудования и дистанционно управлять закрытием выключателя. Мы подробно описали основные программные и аппаратные компоненты прототипа и его использование. Испытания момента показывают, что это вспомогательное устройство для дистанционного закрытия соответствует требованиям момента закрытия ручных выключателей. По сравнению с традиционным методом управления время операций аналогично, что позволяет избежать рисков, связанных с близким контактом с такими выключателями, без увеличения временных затрат, и устройство имеет хорошие инженерные применения.










